ROSの便利機能
Updated on: 2019-11-13
ROSには多くの便利な機能が用意されています。
ここでは、よく利用するコマンドの一部を紹介します。
roslaunch
ROSの基本操作では、roslaunchの利点について説明しました。
launchファイルはXMLフォーマットであり、いくつかのタグが利用可能となっています。
以下はよく利用するタグです。
nodeタグ
起動するノードを指定します。nodeタグの各属性の意味は下記の通りです。
name- ノードインスタンスの名
pkg- ノードを定義するパッケージ名
type- ノードの実行ファイル名(バイナリーやPythonスクリプト)
output- ノードの
stdoutの先:定義しないとstdout(ROS_INFOやstd::coutへの出力等)はターミナルで表示されず、~/.ros/log/に保存されるログファイルだけに出力される。
ターミナルで表示したい場合はscreenにします。
paramタグ
パラメータサーバーにパラメータを設定します。起動されるノードはこのパラメータが利用できます。
paramは<launch>、</launch>の間に入れると、グローバルパラメータになる全ノードが利用できます。
<node>、</node>の間に入れるとプライベートパラメータになり、そのノードだけが利用できます。
各属性は下記の通りです。
name- パラメータ名
value- パラメータの値
type- double, int, string, bool など (一意に決まるときは省略可能)
rosparamタグ
paramタグと同様にパラメータサーバーにパラメータを設定しますが、パラメータの名と値はファイルやコマンドの出力で決まります。
下記のようにYAMLファイルから複雑なパラメータをロードするために便利です。
1
2
3
<rosparam file=
"$(find crane_plus_hardware)/config/servo_controller_manager.yaml"
command="load"/>
remapタグ
ノードとトピックをつなぎ変えます。
remapタグの各属性の意味は下記の通りです。
from- 変更前のトピック名
to- 変更後のトピック名
これを使うことで、ノードとトピックをつなぎ変えることができます。
例えば、下記のような動作計画のノードとロボットのドライバノードがつながっている状態から、新たに衝突回避のノードを加えたいとします。
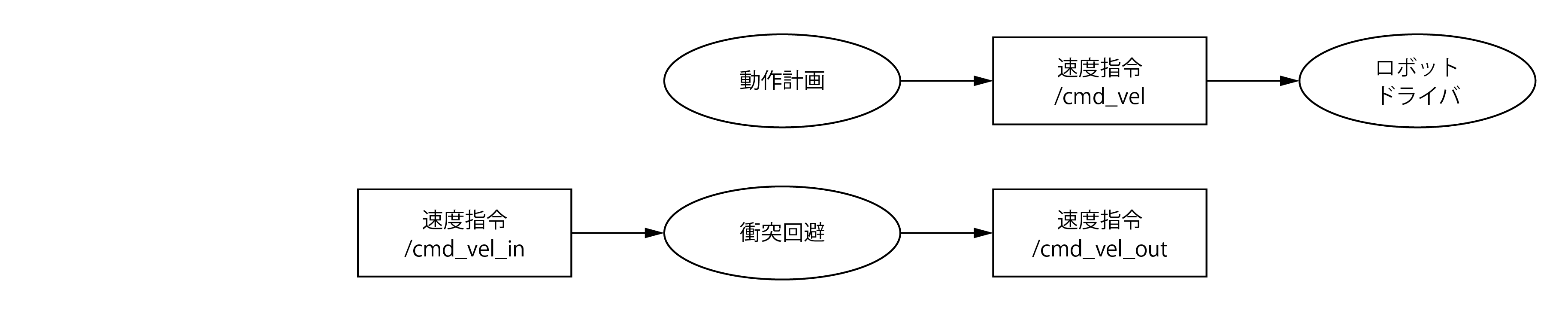
remapを用いることで、各ノードのソースコードを変更することなく、ノードとトピックの接続だけ切り替えて、動作計画とロボットドライバの間に、衝突回避を追加することができます。

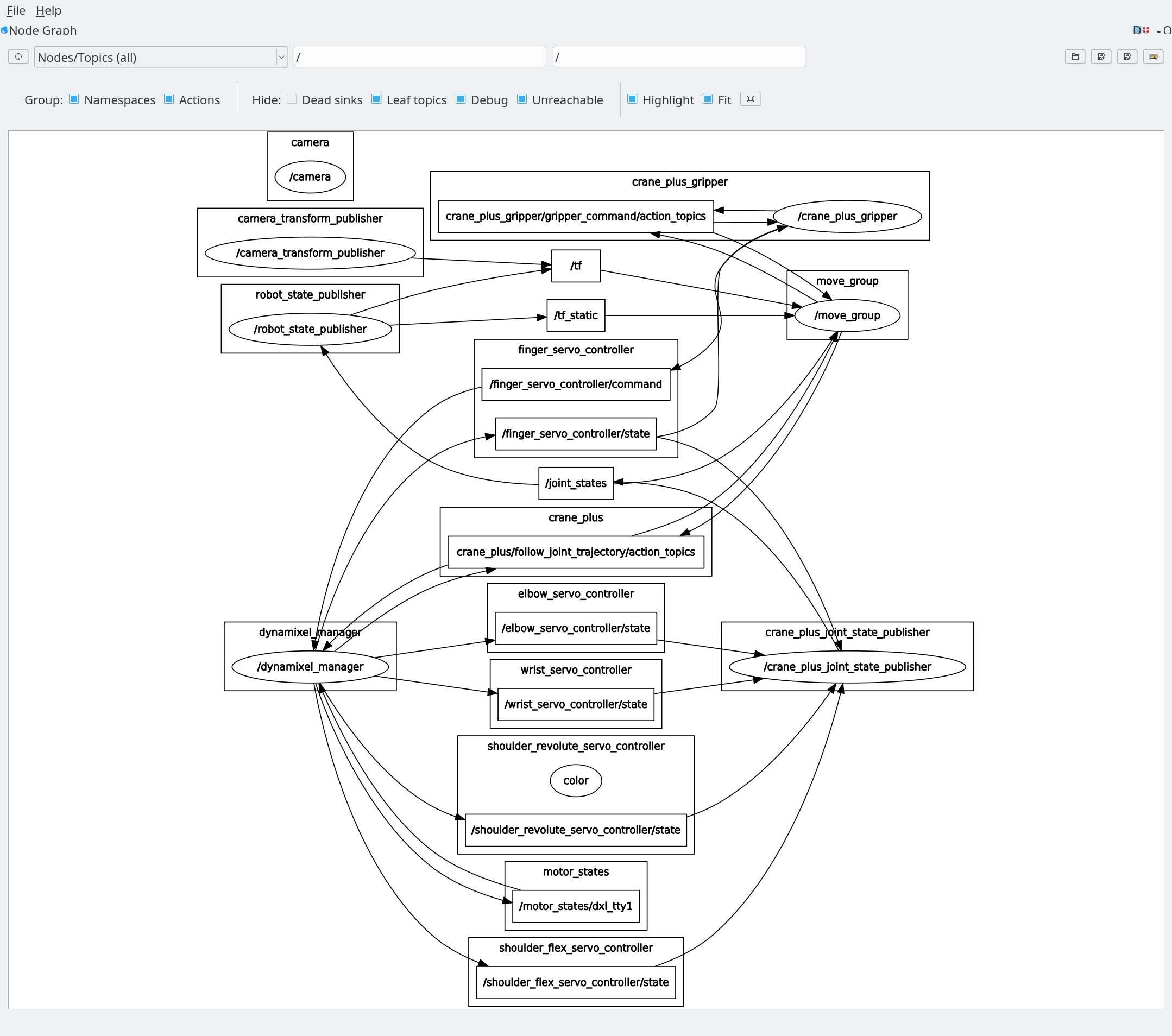
rqt_graph
トピックとノードの接続状態を可視化することができます。
ロボットをPCに接続して、マニピュレータの制御とMoveIt!の利用で説明したようにシステムを実行し、その状態で下記コマンドを実行してみましょう。
1
$ rqt_graph
以下の画像のように、ノードとトピックの接続グラフが表示されます。
rostopic
デバッグなどのため、ROSのトピックに流れているメッセージを確認したいときや、試しにメッセージを送信したいときに、コマンドラインのツールでこれらの処理を行うことができます。
- 存在するトピックを確認する
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
$ rostopic list
/attached_collision_object
/camera/camera_info
/camera/image_raw
/camera/image_raw/compressed
/camera/image_raw/compressed/parameter_descriptions
/camera/image_raw/compressed/parameter_updates
/camera/image_raw/compressedDepth
/camera/image_raw/compressedDepth/parameter_descriptions
/camera/image_raw/compressedDepth/parameter_updates
/camera/image_raw/theora
/camera/image_raw/theora/parameter_descriptions
/camera/image_raw/theora/parameter_updates
/collision_object
/crane_plus/command
/crane_plus/follow_joint_trajectory/cancel
/crane_plus/follow_joint_trajectory/feedback
/crane_plus/follow_joint_trajectory/goal
/crane_plus/follow_joint_trajectory/result
/crane_plus/follow_joint_trajectory/status
/crane_plus/state
/crane_plus_gripper/gripper_command/cancel
/crane_plus_gripper/gripper_command/feedback
/crane_plus_gripper/gripper_command/goal
/crane_plus_gripper/gripper_command/result
/crane_plus_gripper/gripper_command/status
/diagnostics
/elbow_servo_controller/command
/elbow_servo_controller/state
/execute_trajectory/cancel
/execute_trajectory/feedback
/execute_trajectory/goal
/execute_trajectory/result
/execute_trajectory/status
/finger_servo_controller/command
/finger_servo_controller/state
/joint_states
/motor_states/dxl_tty1
/move_group/cancel
/move_group/display_contacts
/move_group/display_planned_path
/move_group/feedback
/move_group/goal
/move_group/monitored_planning_scene
/move_group/ompl/parameter_descriptions
/move_group/ompl/parameter_updates
/move_group/plan_execution/parameter_descriptions
/move_group/plan_execution/parameter_updates
/move_group/planning_scene_monitor/parameter_descriptions
/move_group/planning_scene_monitor/parameter_updates
/move_group/result
/move_group/sense_for_plan/parameter_descriptions
/move_group/sense_for_plan/parameter_updates
/move_group/status
/move_group/trajectory_execution/parameter_descriptions
/move_group/trajectory_execution/parameter_updates
/pickup/cancel
/pickup/feedback
/pickup/goal
/pickup/result
/pickup/status
/place/cancel
/place/feedback
/place/goal
/place/result
/place/status
/planning_scene
/planning_scene_world
/rosout
/rosout_agg
/shoulder_flex_servo_controller/command
/shoulder_flex_servo_controller/state
/shoulder_revolute_servo_controller/command
/shoulder_revolute_servo_controller/state
/tf
/tf_static
/trajectory_execution_event
/wrist_servo_controller/command
/wrist_servo_controller/state
- 一つのトピックに流れているメッセージを確認する
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
$ rostopic echo /joint_states
header:
seq: 12510
stamp:
secs: 1495596313
nsecs: 93947887
frame_id: ''
name: ['crane_plus_shoulder_flex_joint']
position: [-0.9612946270750019]
velocity: [0.0]
effort: [0.0]
---
header:
seq: 12511
stamp:
secs: 1495596313
nsecs: 141926050
frame_id: ''
name: ['crane_plus_moving_finger_joint']
position: [0.5471198143458788]
velocity: [0.0]
effort: [0.0]
---
header:
seq: 12512
stamp:
secs: 1495596313
nsecs: 125914096
frame_id: ''
name: ['crane_plus_wrist_joint']
position: [-1.1198059751565181]
velocity: [0.0]
effort: [0.0]
[Ctrl+c]
-
一つのトピックにメッセージを送信する
Tab でトピック名、データ型及びメッセージのテンプレートが出せます。
1
2
$ rostopic pub -1 /block geometry_msgs/Pose2D "{x: 0.2, y: 0.0}"
publishing and latching message for 3.0 seconds
-1を利用すると一回のみ送信します。-1を削除するとrostopicは Ctrl+c を入力するまで送信し続けます。
rosbag
ROSで提供されているrosbagツールを用いると、ROS上で送信、受信されているデータ(メッセージ)を記録・再生することができます。
-
データを記録(マニピュレータの一つのサーボステートとロボットの前ジョイントステートを記録する例)
1
$ rosbag record /elbow_servo_controller/state /joint_states記録の終了は、Ctrl+c で行います。記録されたデータは、「日付時刻.bag」のファイル名で保存されています。
-
データを再生する
1
$ rosbag play ファイル名.bag
RViz
ROSでは、RVizという、データ可視化ツール(ビューワ)が提供されています。
今回のセミナーの環境にも、インストールされており、マニピュレータの姿勢等を表示することができます。
ロボットをPCに接続して、マニピュレータの制御とMoveIt!の利用で説明したようにシステムを実行し、その状態で下記コマンドを実行してみましょう。
1
$ rviz
RVizでカメラの制御は以下で行います。
- マウスをクリックとドラッグ
- 青い点を中心にしてカメラの回転
- Shift を押しながらマウスをクリックとドラッグ または マウスをミドルクリックとドラッグ
- 青い点を中心にしてカメラをXYで移動する
- マウスウィール または マウス右クリックとドラッグ
- 青い点を中心にしてカメラズーム
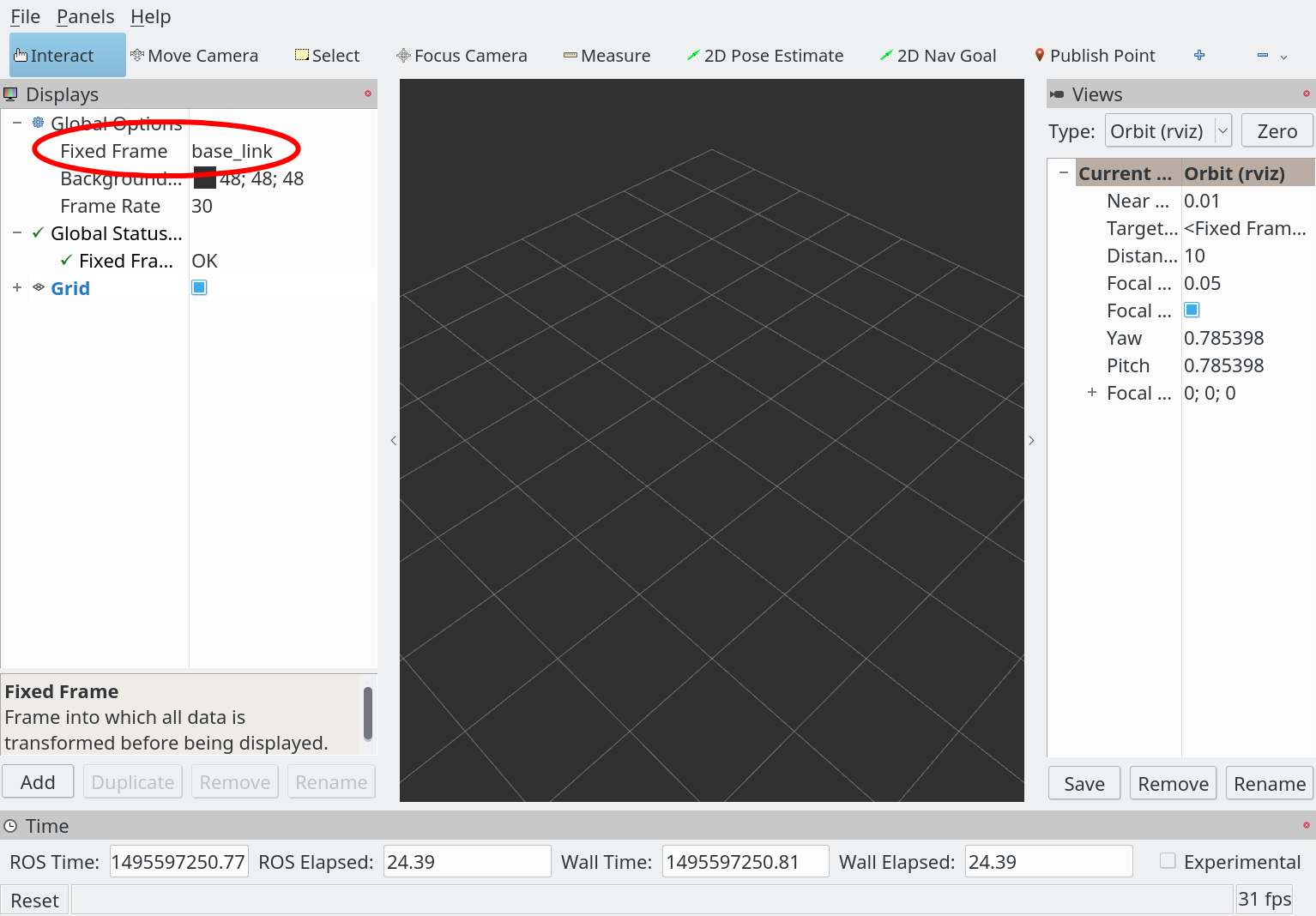
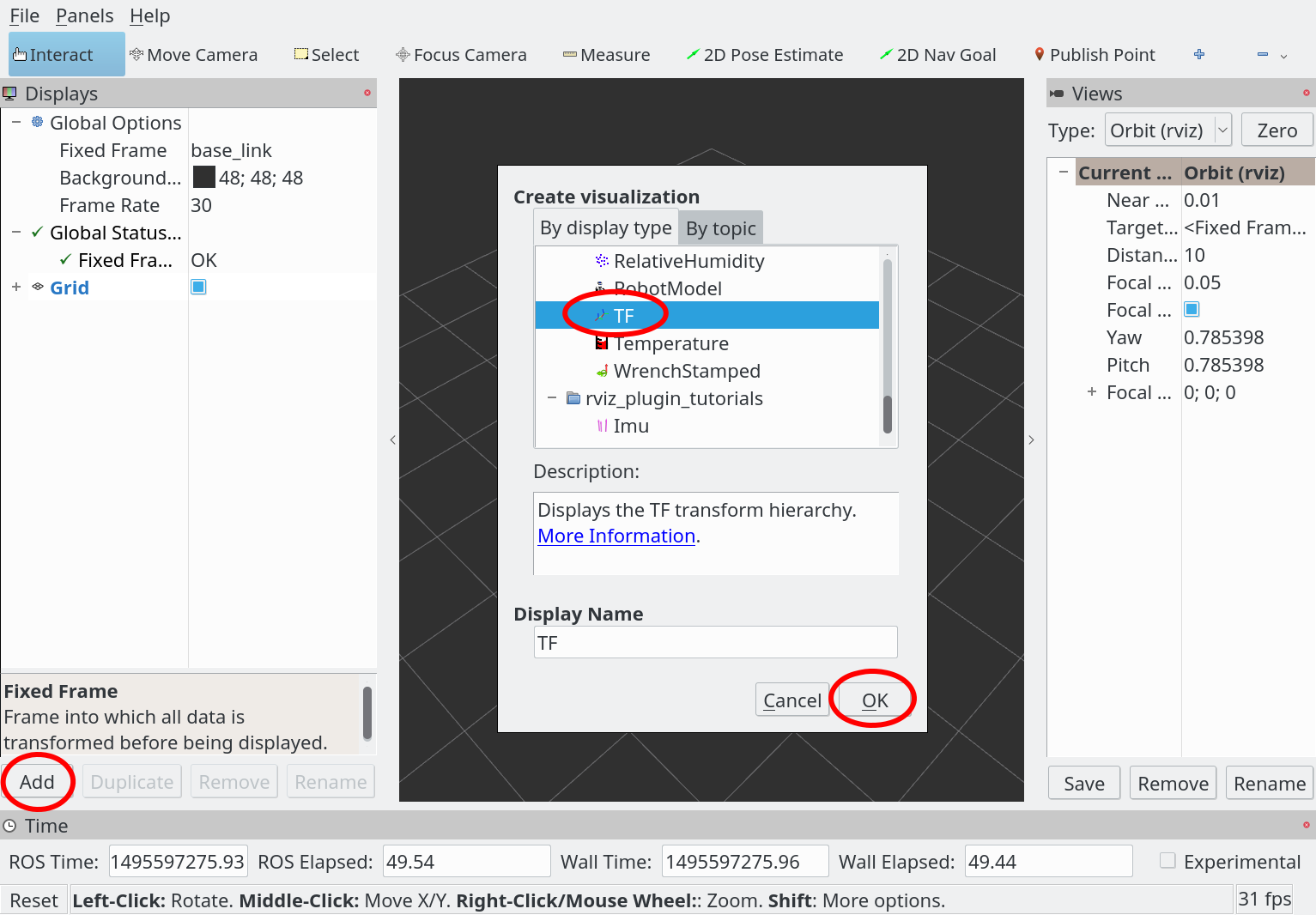
まずは、RVizにどの座標系でデータを表示するか指定することが必要です。
RViz画面中の「Fixed Frame」の右側でbase_linkを選択します。
これからRViz上でデータを可視化できます。マニピュレータの姿勢を表示しましょう。
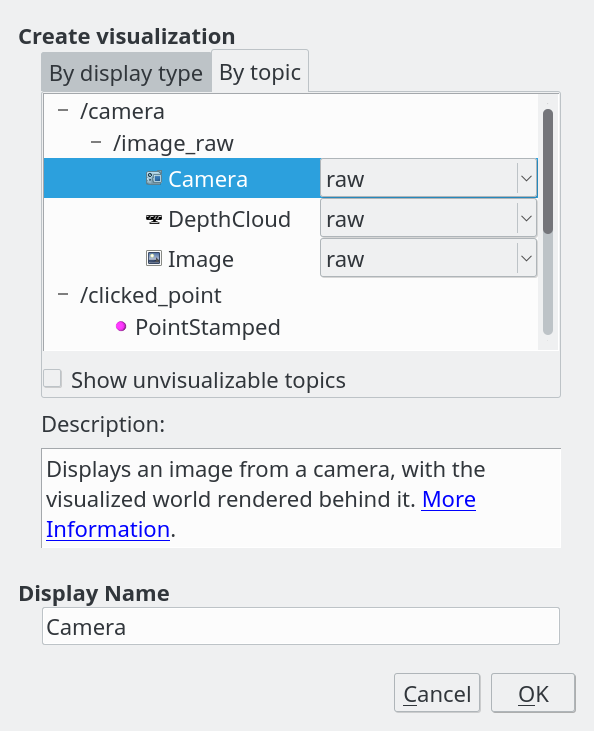
RViz画面中の「add」ボタンをクリックし、開いた選択ウィンドー内で「By display type」タブから「TF」を選択します。
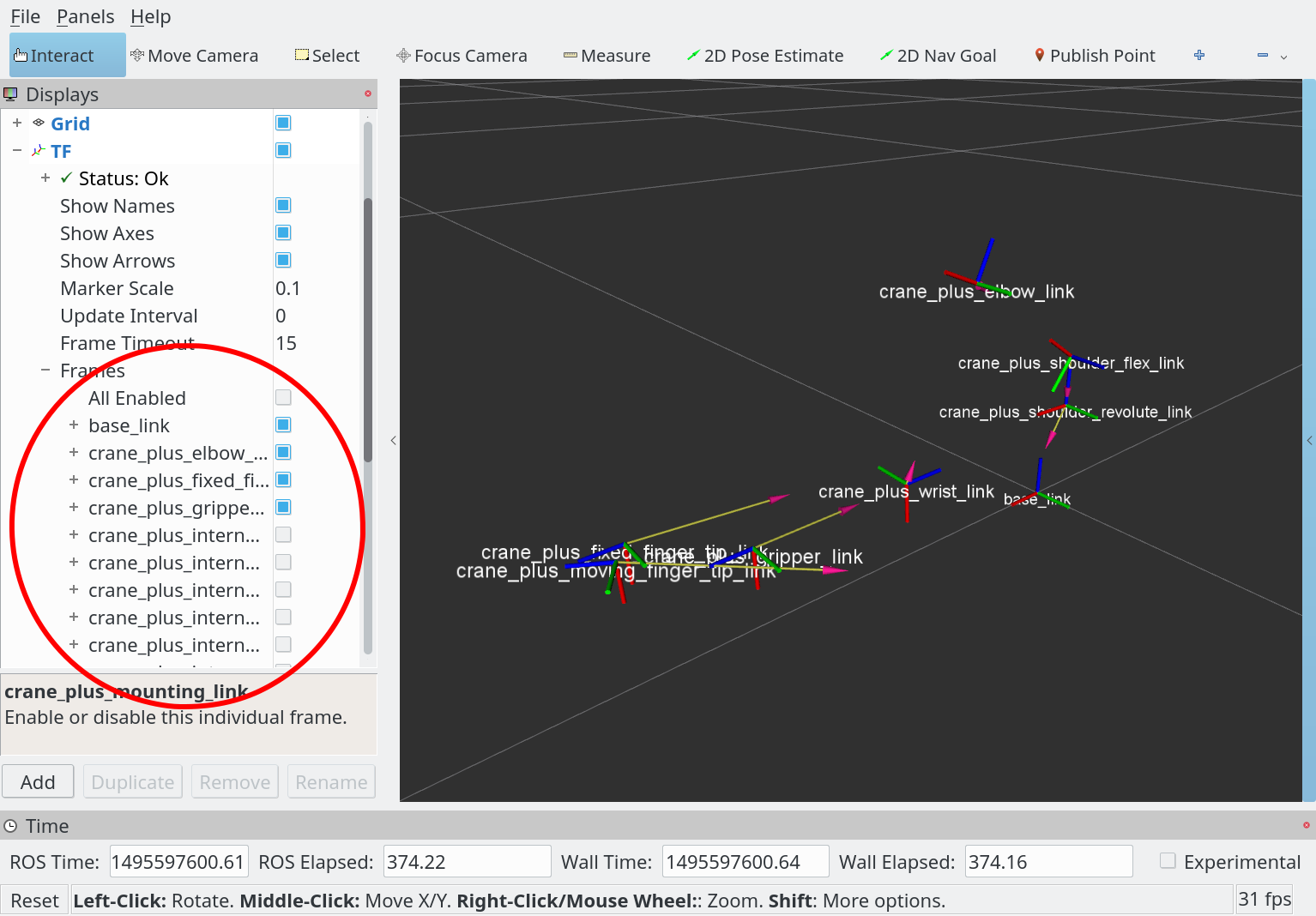
CRANE+は多くのタスクフレームを持つため、前フレームを表示すると見にくくなります。
左側のパネルで表示されているデータの表示方法等が変更できます。
フレームを少し減らしましょう。
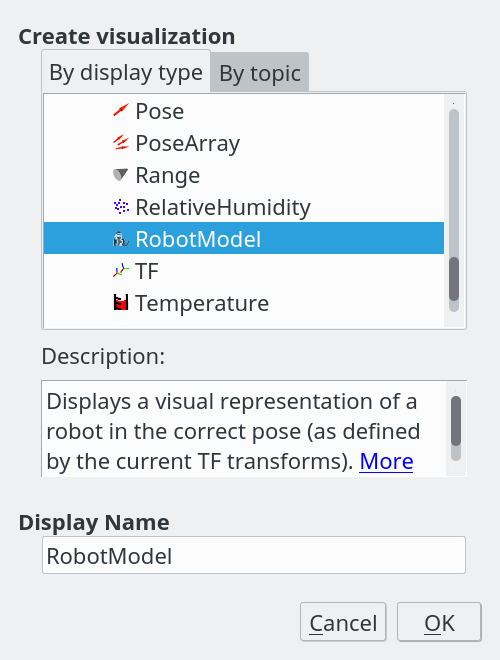
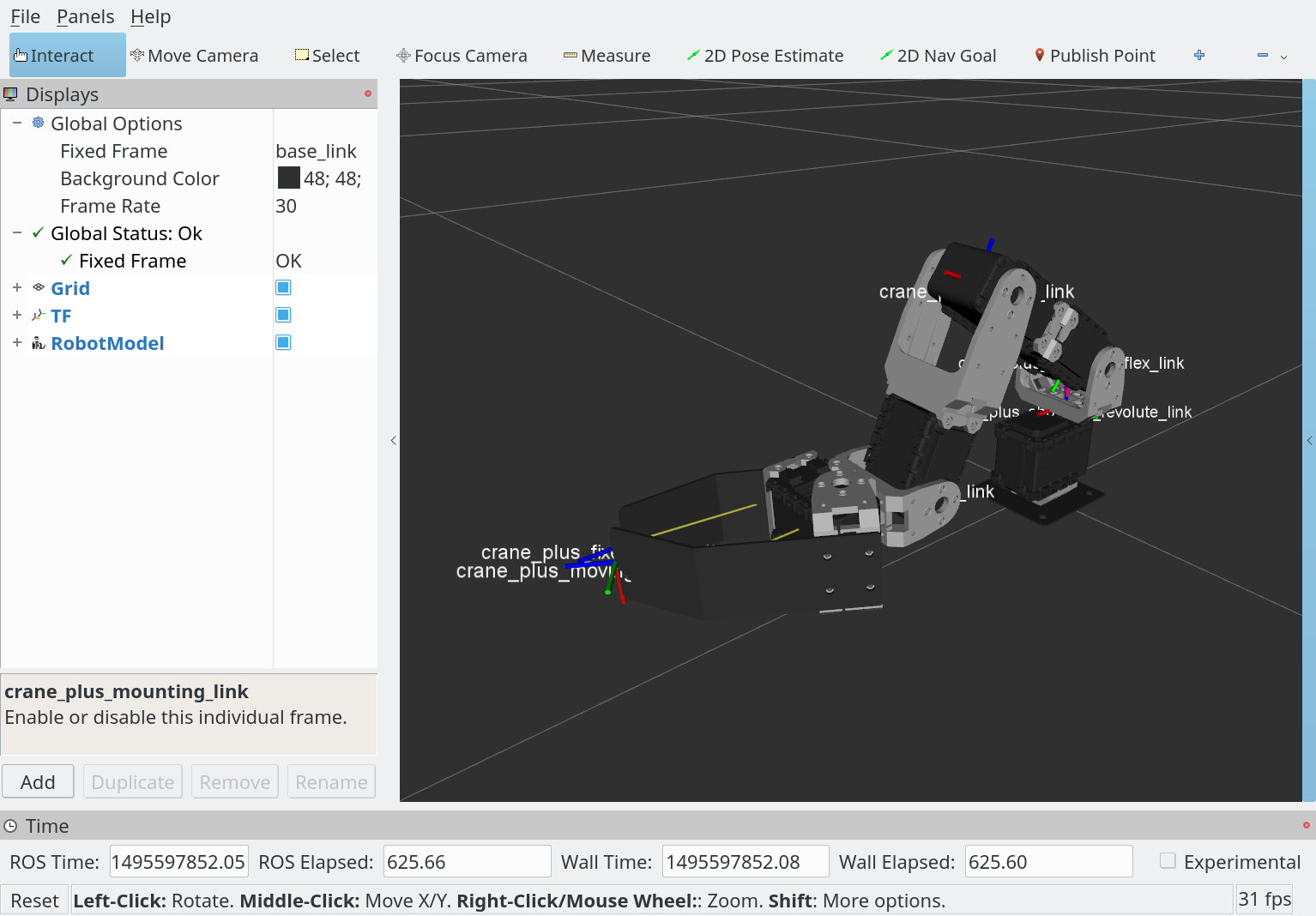
しかし、タスクフレームが見えてもまだ分かりにくいです。
ロボット自体が見えたらより分かりやすいです。
このためにRVizはロボットモデルの表示ができます。「add」ボタンをクリックし、「RobotModel」を選択します。
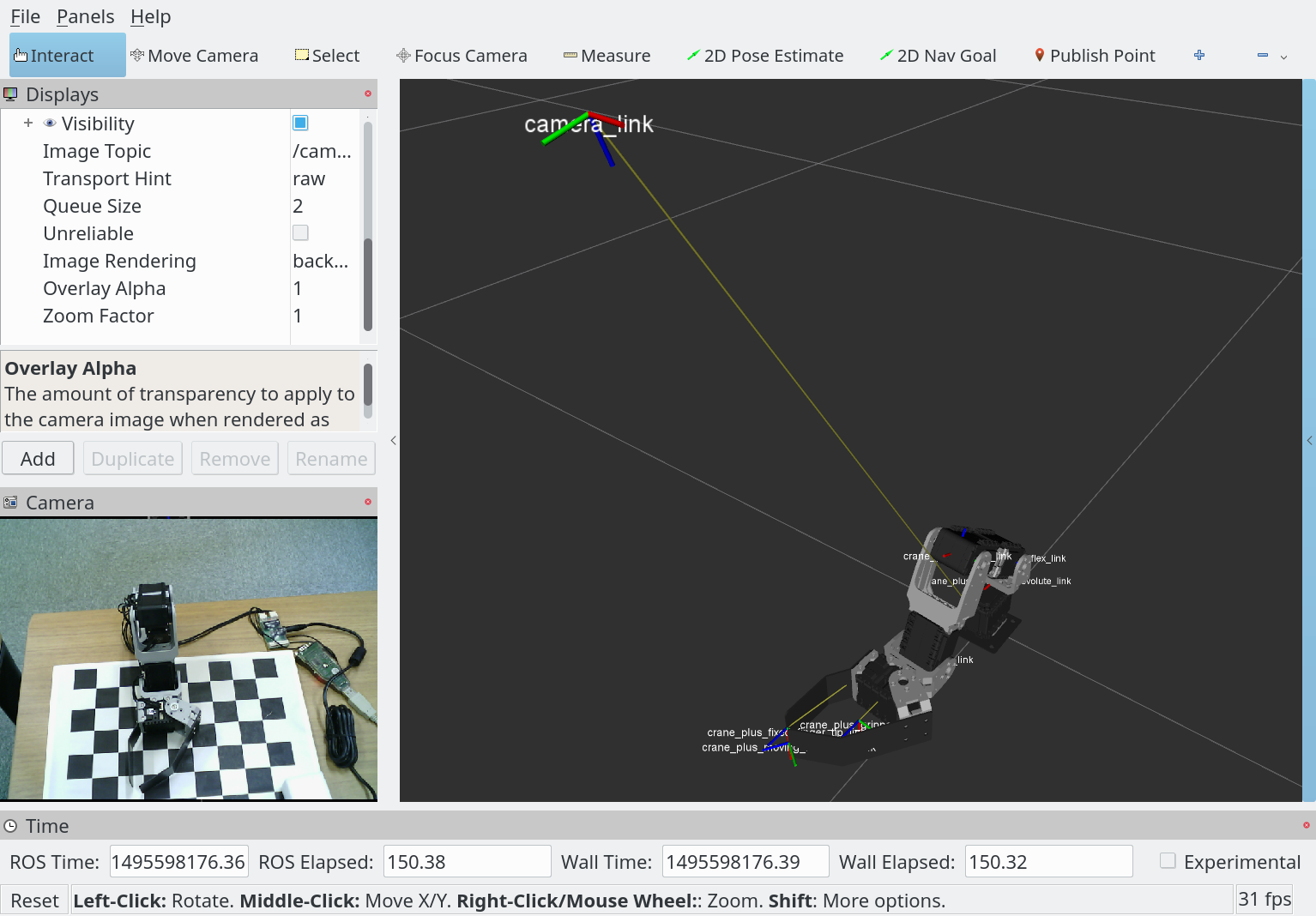
レーザーセンサーやロボットの道などのような他のセンサーデータなども表示できます。以下はカメラからのデータを表示する例です。
RVizが正しく表示されない場合
正常にRVizを起動できると、ウインドウ中央部分は、灰色背景にグリッドが表示されます。
これが表示されず、画面が乱れたり、真っ黒になる場合、グラフィックドライバがRVizのOpenGL表示に対応していない可能性があります。
この場合、以下のコマンドで、一時的にOpenGLのハードウェアアクセラレーションを無効にしてRVizを起動し、正しく表示されるか確認して下さい。
1
2
$ export LIBGL_ALWAYS_SOFTWARE=1
$ rviz
正しく表示された場合は、以下のコマンドで、ターミナルを開いたときに、自動的にハードウェアアクセラレーションの無効化設定を行うように設定します。
(次に新たに開いたターミナルウインドウから、設定が有効になります。)
1
$ echo "export LIBGL_ALWAYS_SOFTWARE=1" >> ~/.bashrc
シミュレータ
ロボットハードウェア制御システムの開発には大きな課題があります。
制御ソフトウェアにエラー・バグがある場合、高価なハードウェアを壊す可能性があることです。
そのリスクを防ぐためにシミュレータの利用が強くおすすめします。
ROSでは、Gazeboというシミュレータが基本的に利用されます。
CRANE+のシミュレーションを利用するために、下記のパッケージのインストールが必要です。
1
2
$ sudo apt-get install ros-kinetic-joint-trajectory-controller
$ sudo apt-get install ros-kinetic-effort-controllers
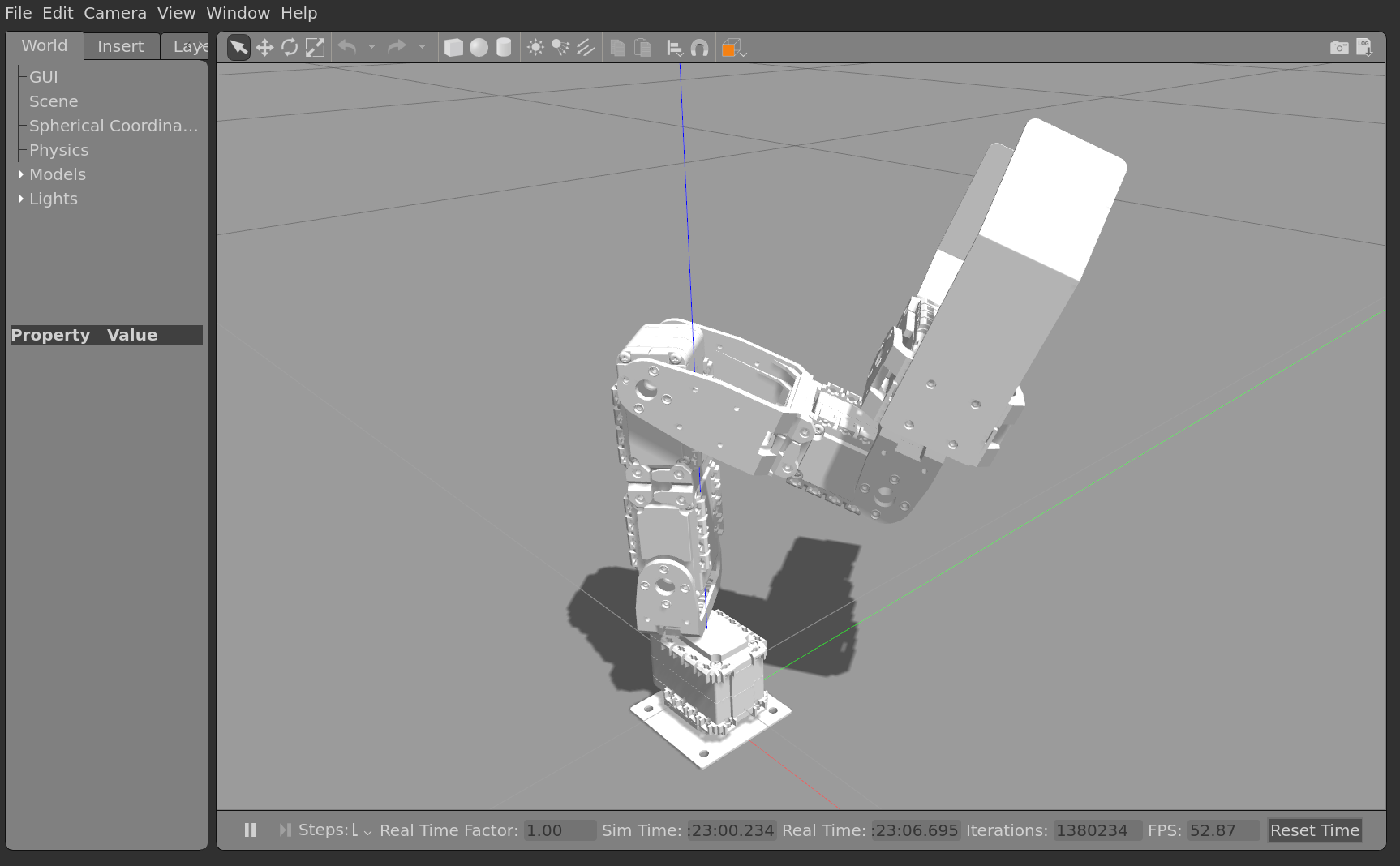
以下の実行でCRANE+のシミュレーションを起動します。
1
2
3
$ cd ~/crane_plus_ws/
$ source devel/setup.bash
$ roslaunch crane_plus_simulation simulation.launch
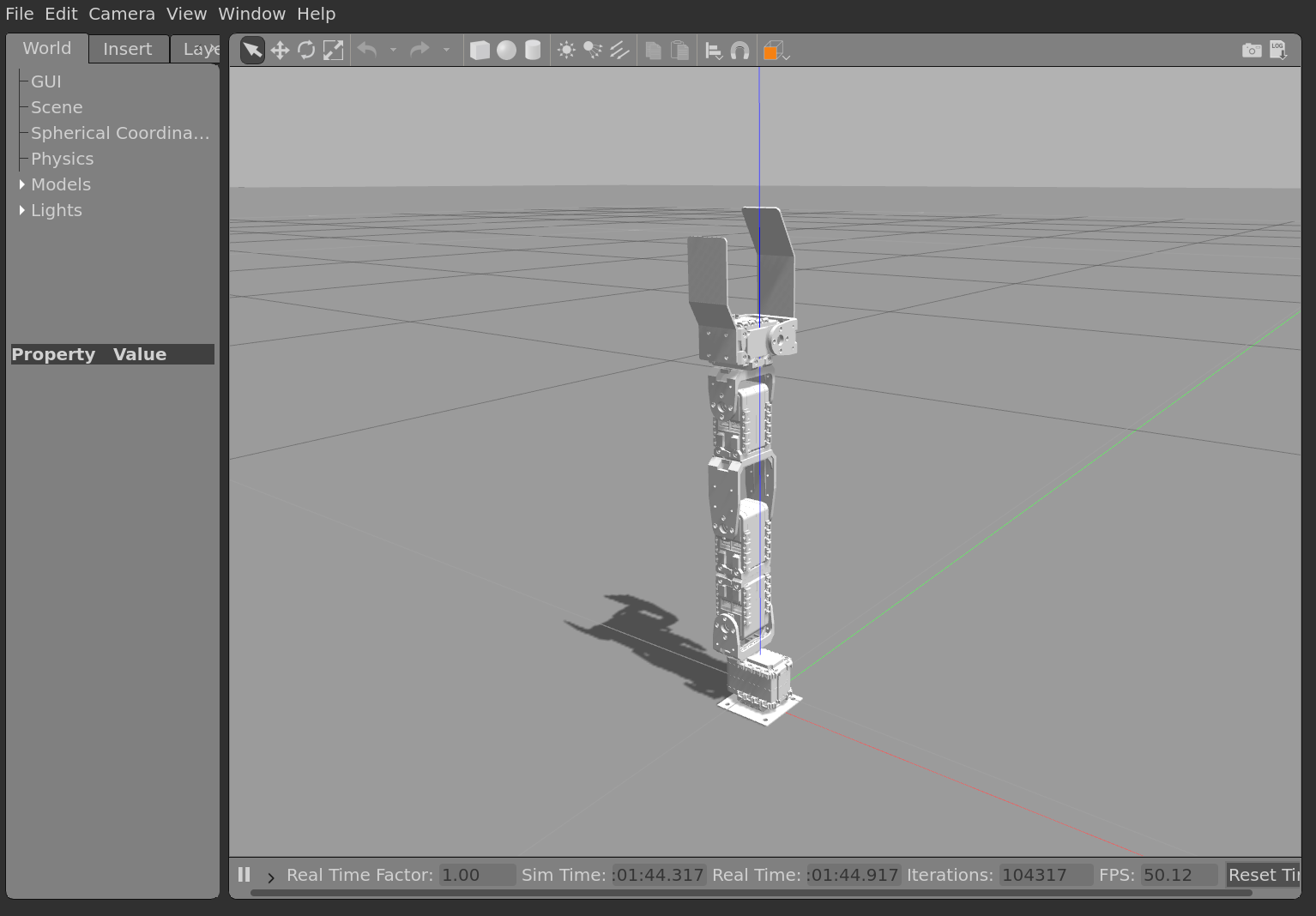
Gazeboでカメラの制御は以下で行います。
- マウスをクリックとドラッグ
- クリックした点を中心にしてカメラをXZで移動する
- Shift を押しながらマウスをクリックとドラッグ または マウスをミドルクリックとドラッグ
- クリックした点を中心にしてカメラの回転
- マウスウィール または マウス右クリックとドラッグ
- クリックした点を中心にしてカメラズーム(注意:シミュレータ世界の座標点なので、遠方をクリックしてズームするとカメラが急に遠くなります)
次にMoveIt!を起動します。新しいターミナルで以下を実行します。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
$ cd ~/crane_plus_ws/
$ source devel/setup.bash
$ roslaunch crane_plus_moveit_config move_group.launch
... logging to /home/username/.ros/log/7b527712-3aa3-11e7-b868-d8cb8ae35bff/
roslaunch-alnilam-3483.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://alnilam:33499/
SUMMARY
(省略)
[ INFO] [1494986092.617635076, 141.869000000]: MoveGroup context initialization complete
You can start planning now!
最後に「You can start planning now!」が出力されたら、マニピュレータは利用可能な状態になりました。
MoveIt!は、ROSノードでMoveIt!のAPIを利用することが基本の利用方法です。
しかし、試すだけのためにノードを利用するや手動制御の時、ノードの利用は重い作業です。)
ノードを作成の代わりにROSの基本の可視化ツールRVizも利用できます。
MoveIt!はRViz上でマニピュレータ制御ユーザーインターフェースをプラグインとして提供します。
MoveIt!と同時にインストールされて、CRANE+のMoveIt!パッケージから起動します。
新しいターミナルで以下を実行してRVizのMoveIt!ユーザーインターフェースを起動します。
1
2
3
$ cd ~/crane_plus_ws/
$ source devel/setup.bash
$ roslaunch crane_plus_moveit_config moveit_rviz.launch config:=true
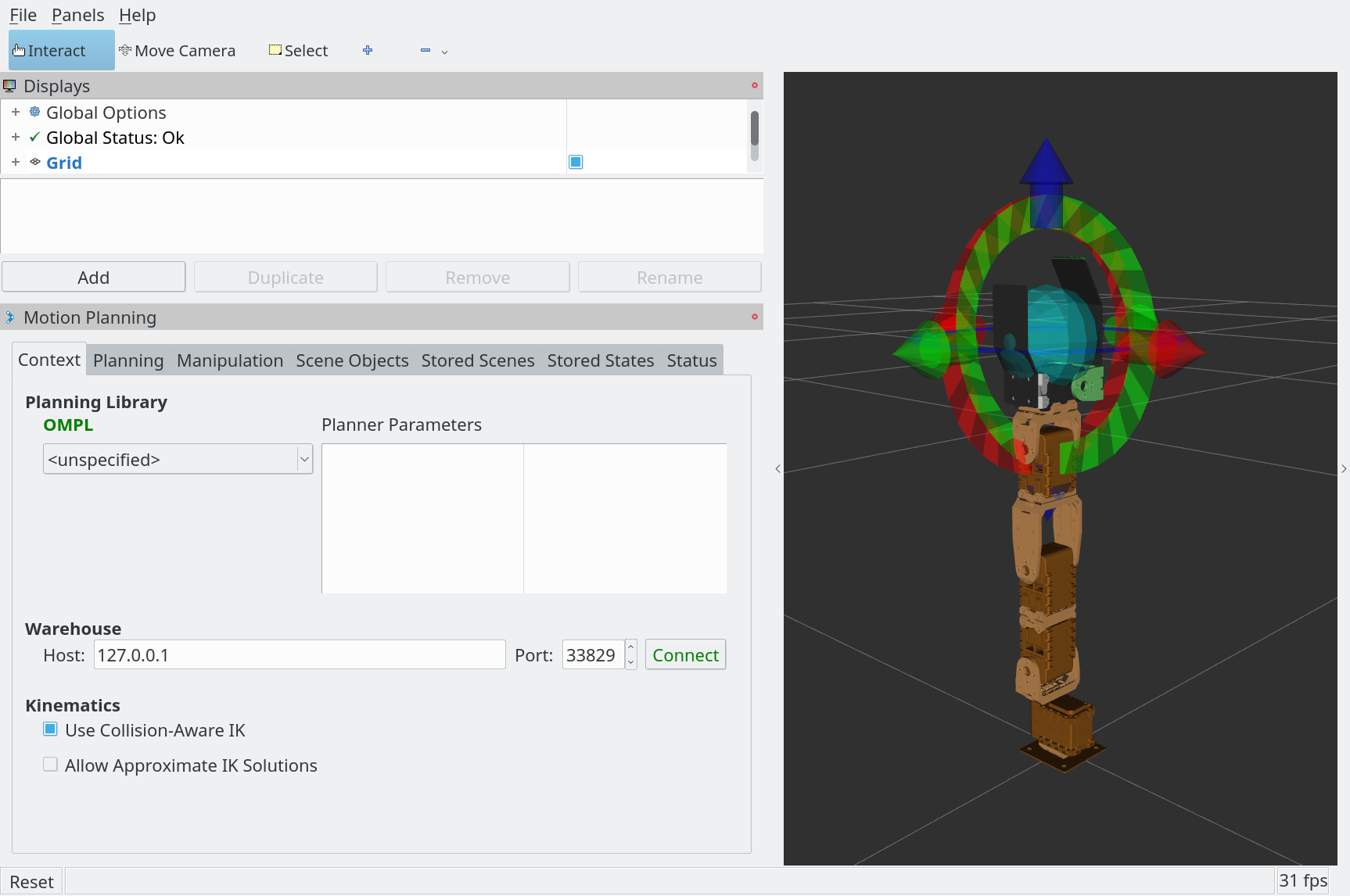
注意:コマンドの最後にconfig:=trueを忘れると、上記画像のようなGUIが表示されません。
RVizでカメラの制御は以下で行います。
- マウスをクリックとドラッグ
- 青い点を中心にしてカメラの回転
- Shift を押しながらマウスをクリックとドラッグ または マウスをミドルクリックとドラッグ
- 青い点を中心にしてカメラをXYで移動する
- マウスウィール または マウス右クリックとドラッグ
- 青い点を中心にしてカメラズーム
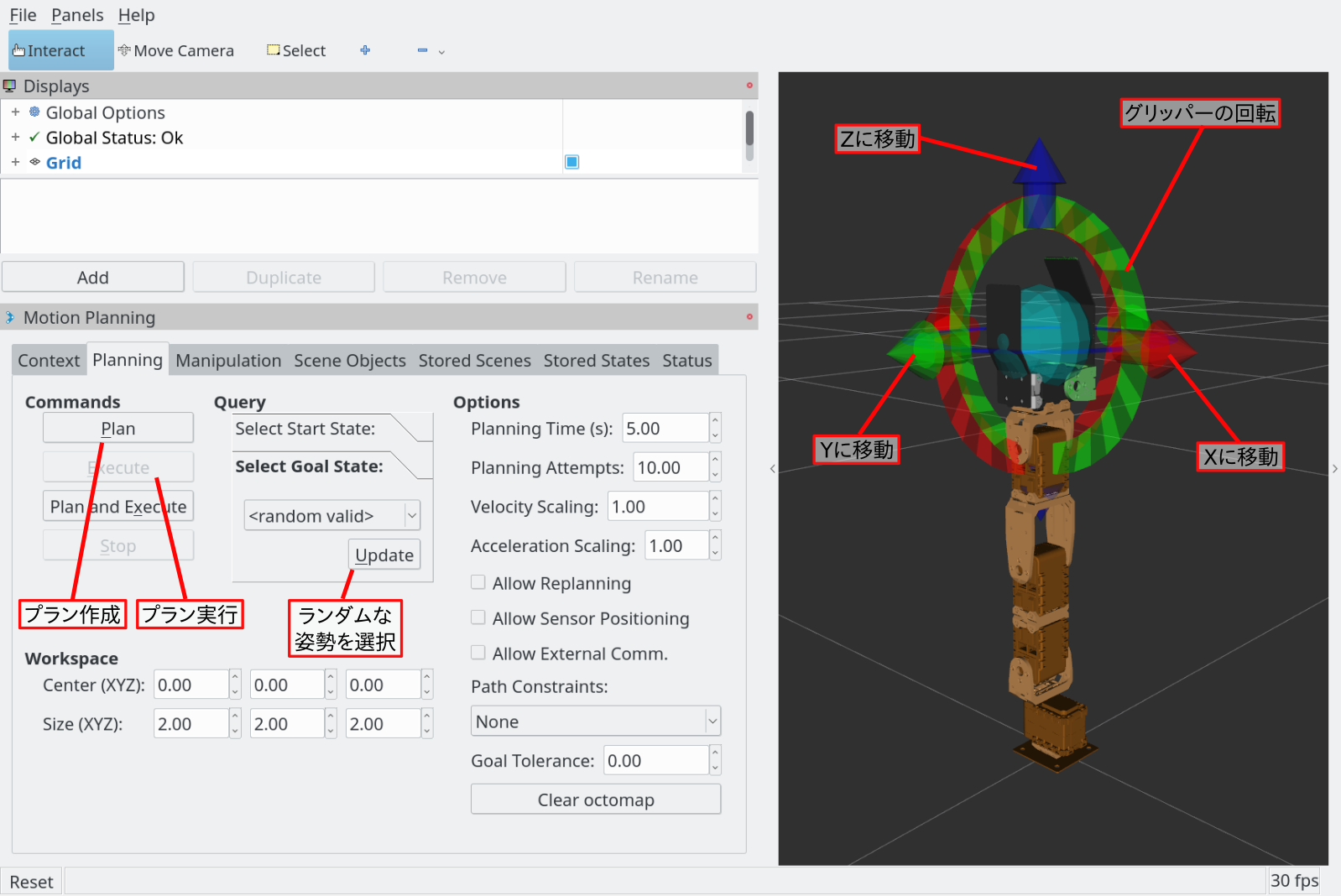
RViz内の「Motion Planning」パネルにある「Planning」タブをクリックして、以下のインターフェースを開きます。
最初のテストとして、マニピュレータをランダムな姿勢に移動しましょう。
Planningタブ内の「Select Goal State」で「<random valid>」が選択されているを確認して、「Update」をクリックします。
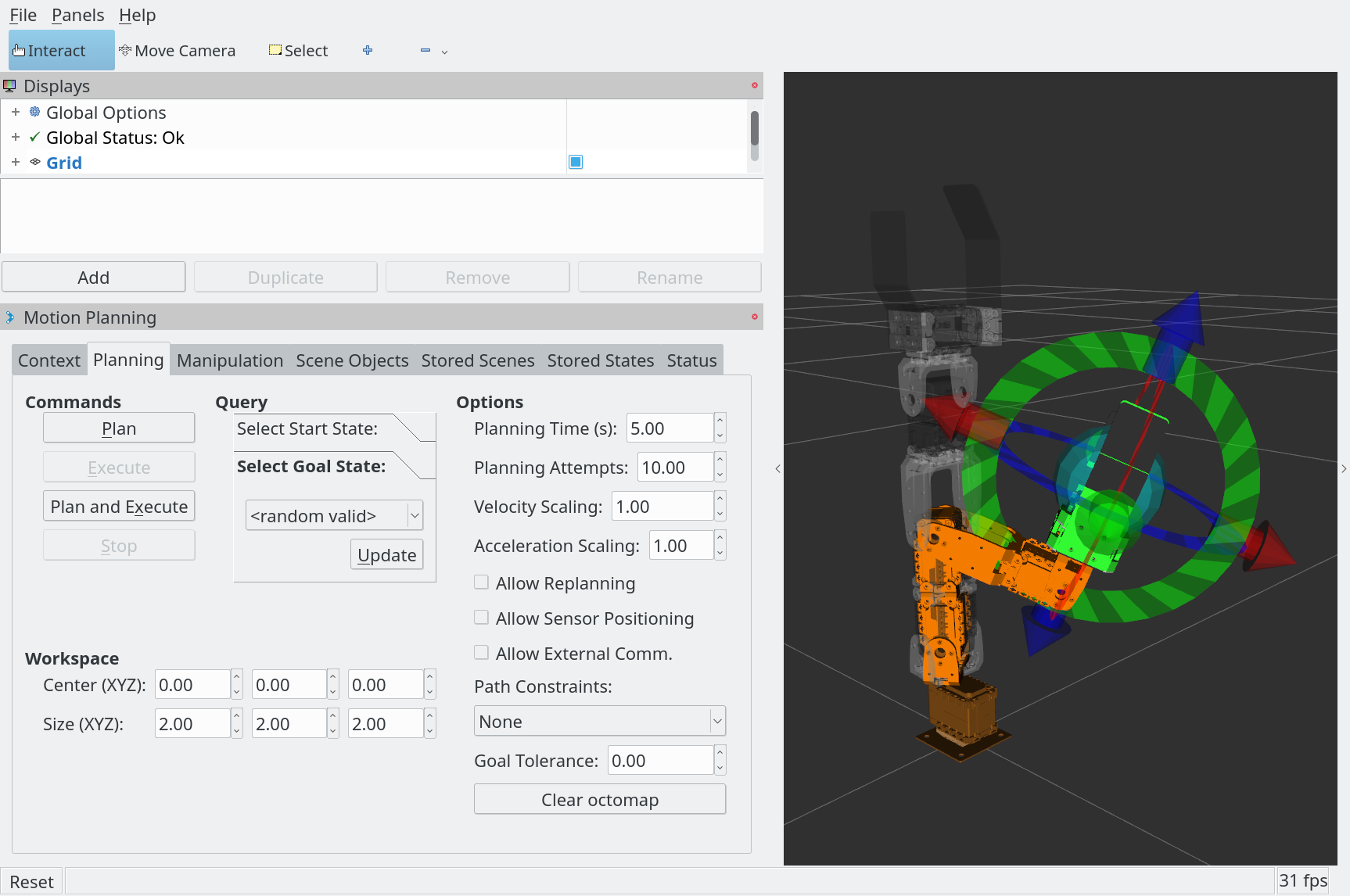
「Plan」をクリックします。MoveIt!が移動プランを計算します。
RVizでロボットが追う経路は表示されます。
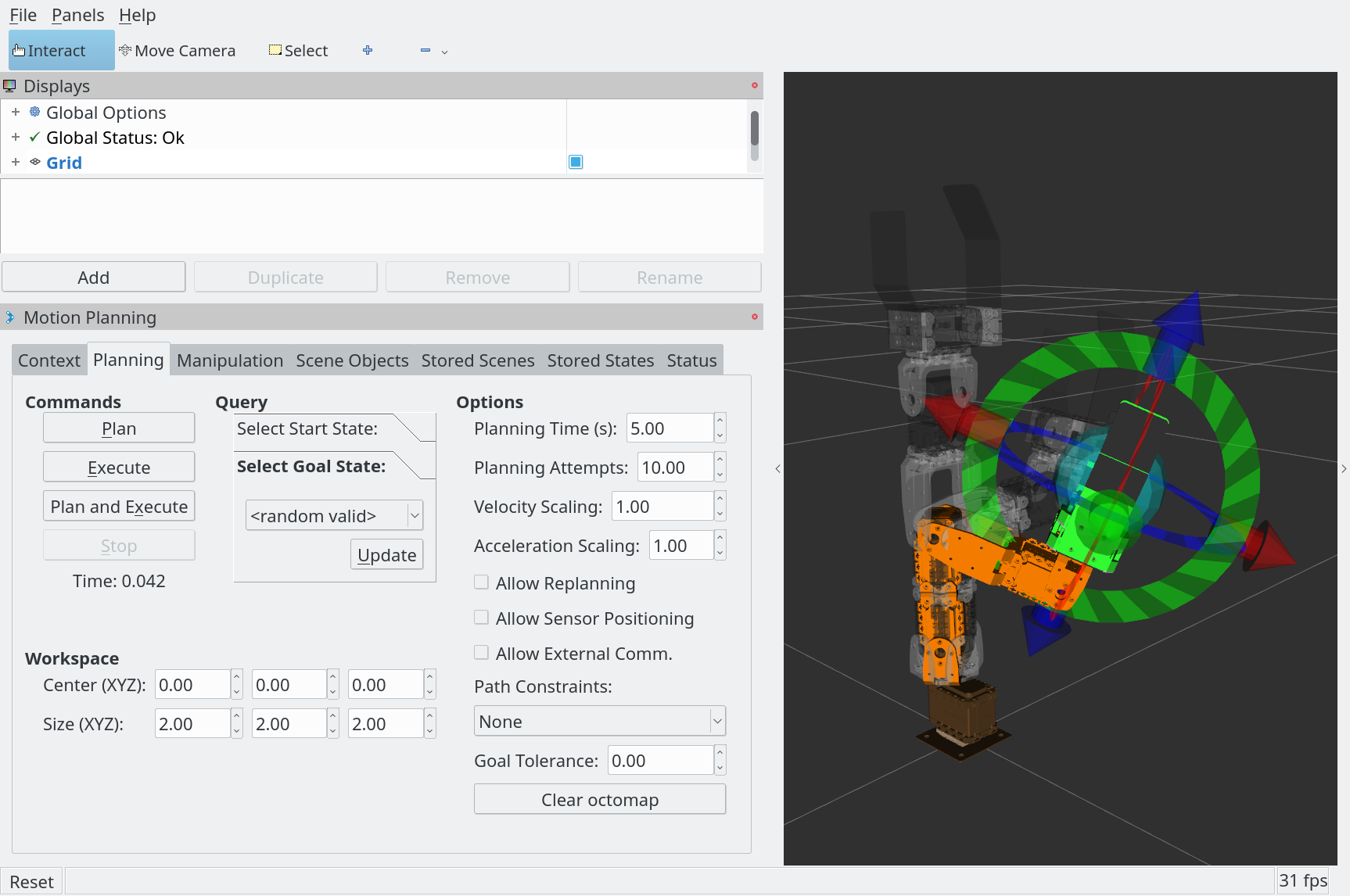
プランを実行します。
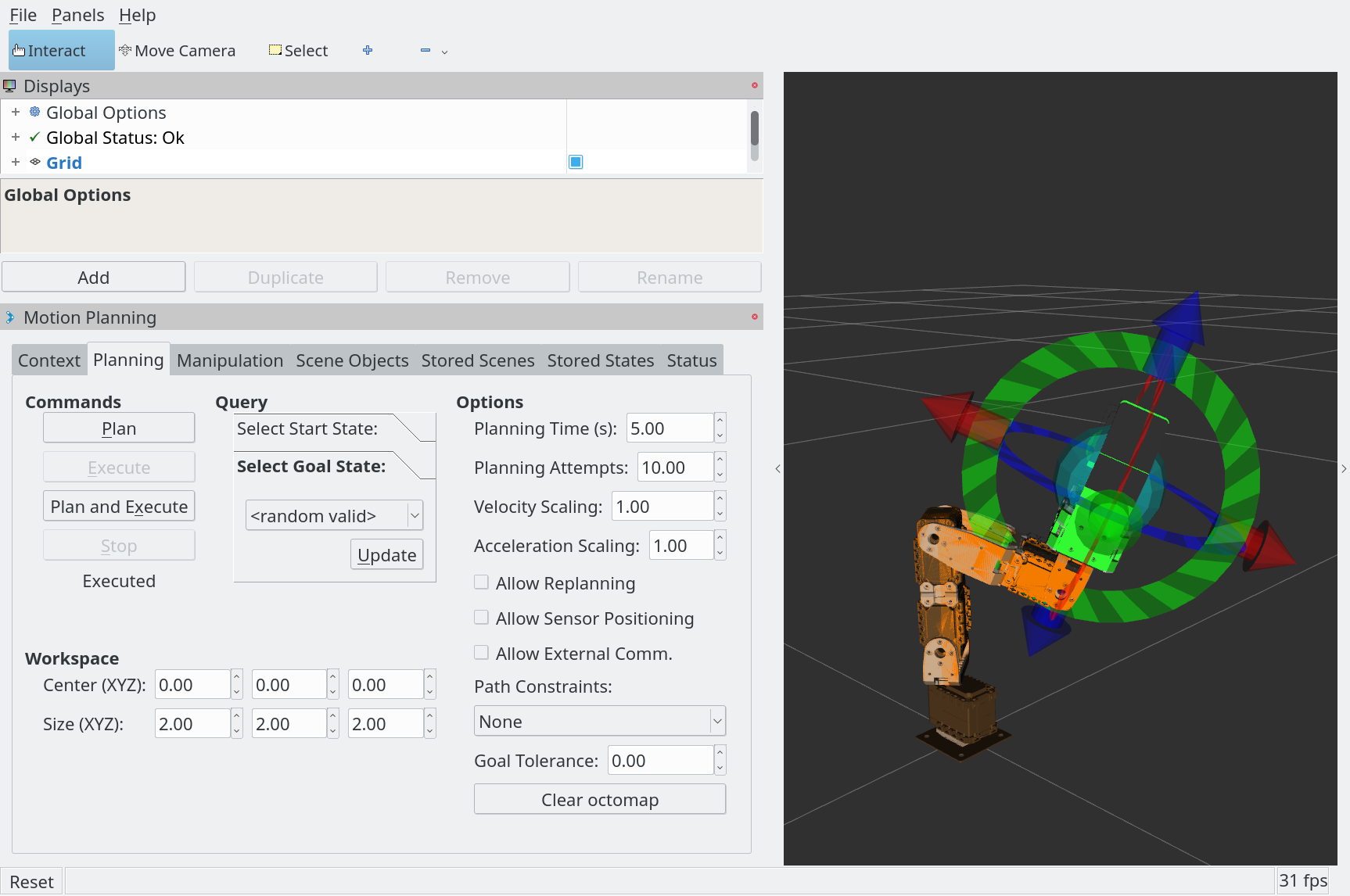
「Execute」をクリックするとシミュレータ上のマニピュレータが指定した姿勢に移動します。
RViz上でロボットの現在の姿勢が表示され、これも指定したポーズ(すなわちシミュレータ上のロボットのポーズ)に移動します。
ランダムな姿勢に移動できたら、次に手動制御を行いましょう。RViz内でマニピュレータの先端に球体と丸と矢印があります。
以下の方法でこれらを利用してグリッパーの位置と角度が制御できます。
- 球体をドラッグ
- グリッパーの位置を移動する。
- 丸を回す
- グリッパーの角度を変更する。(注意:CRANE+は4DOFのマニピュレータだけなのでグリッパーの角度は上下(緑色の丸)しか変更できない。他の角度変更は無視される。)
- 矢印をドラッグ
- グリッパーの位置を一つの軸だけで移動する。
基本的にMoveIt!のユーザーインターフェースは制御可能な姿勢しか許さないので、時々マニピュレータが移動してくれないことや位置が飛ぶことがあります。
お好みの姿勢にグリッパーを移動して、「Plan」と「Execute」ボタンでマニピュレータを移動しましょう。
シミュレータ上のロボットはグリッパーが指定した位置と角度になるように動きます。
VMWareでGazeboを利用する場合
VMWareでGazeboを利用する場合、Gazeboは一瞬起動した後落ちて下記のエラーが表示されることがあります。
1
VMware: vmw_ioctl_command error Invalid argument.
原因はGazeboとVMWareのOpenGLドライバーの互換性に関する問題です。
下記のコマンドで利用可能なOpenGLフィーチャに制限をかけるとGazeboは起動できます。
1
$ export SVGA_VGPU10=0
同じターミナルでGazeboを起動します。
または、以下のコマンドでターミナルを開いたときに自動的に設定を行うように設定します。
(次に新たに開いたターミナル以降、設定が有効になります。)
1
$ echo "export SVGA_VGPU10=0" >> ~/.bashrc
MoveIt!の可視化
プラニングシーンの可視化
MoveIt!でプラニングを行う際、マニピュレータの周りの物体を考慮する機能があります。
マニピュレータの周りを「planning scene」(プラニングシーン)と呼びます。
プラニングシーンの主な目的はマニピュレータが周りの物体と接触せずに移動することです。
本セミナーは時間制限の上で本機能の説明を詳しくすることはできません。
でも、プラニングシーンを可視化のためにも利用できます。
例えば、ブロックをピッキングする時にブロックがマニピュレータに対してどこにあるかや、下のテーブルの可視化ができます。
マニピュレータの制御とMoveIt!の利用で作成したピック・アンド・プレースノードにプラニングシーンを利用して可視化を追加して本機能をデモします。
まずはヘッダーファイルです。
1
2
3
4
5
6
7
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <geometry_msgs/Pose.h>
#include <moveit_msgs/CollisionObject.h>
#include <shape_msgs/SolidPrimitive.h>
#include <string>
#include <vector>
PlanningSceneInterfaceとgripperというMoveGroupのメンバー変数を追加します。
1
2
3
private:
moveit::planning_interface::MoveGroupInterface gripper_group_;
moveit::planning_interface::PlanningSceneInterface scene_;
SetupPlanningScene関数を追加してクラスのコンストラクターから呼びます。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
PickNPlace((省略))
(省略)
gripper_group_("gripper") {
(省略)
SetupPlanningScene();
(省略)
}
void SetupPlanningScene() {
ROS_INFO("Setting up planning scene");
// プラニングシーンを空にする
std::vector<std::string> objs;
for (auto o: scene_.getObjects()) {
objs.push_back(o.first);
}
for (auto o: scene_.getAttachedObjects()) {
objs.push_back(o.first);
}
scene_.removeCollisionObjects(objs);
// シーンにテーブルを追加
moveit_msgs::CollisionObject table;
table.header.frame_id = "base_link";
table.id = "table";
// テーブルの箱を指定
shape_msgs::SolidPrimitive primitive;
primitive.type = primitive.BOX;
primitive.dimensions.resize(3);
primitive.dimensions[0] = 1;
primitive.dimensions[1] = 1;
primitive.dimensions[2] = 0.1;
// テーブルの姿勢
geometry_msgs::Pose pose;
pose.position.x = 0;
pose.position.y = 0;
pose.position.z = -0.05;
pose.orientation.w = 1;
table.primitives.push_back(primitive);
table.primitive_poses.push_back(pose);
// 追加
table.operation = table.ADD;
// テーブルの色
std_msgs::ColorRGBA colour;
colour.b = 0.5;
colour.a = 1;
// シーンに追加
scene_.applyCollisionObject(table, colour);
// テーブルはスポンジキューブに下にあるとしてい
// (当たってもいいということ)
arm_.setSupportSurfaceName("table");
}
スポンジキューブが発券されたらシーンに追加する関数とシーンから削除する関数を追加します。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
void AddBoxToScene(geometry_msgs::Pose2D const& location) {
moveit_msgs::CollisionObject sponge;
sponge.header.frame_id = "base_link";
sponge.id = "sponge";
shape_msgs::SolidPrimitive primitive;
primitive.type = primitive.BOX;
primitive.dimensions.resize(3);
primitive.dimensions[0] = 0.04;
primitive.dimensions[1] = 0.04;
primitive.dimensions[2] = 0.031;
geometry_msgs::Pose pose;
pose.position.x = 0.17;
pose.position.y = 0.0;
pose.position.z = 0.015;
pose.orientation.w = 1;
sponge.primitives.push_back(primitive);
sponge.primitive_poses.push_back(pose);
sponge.operation = sponge.ADD;
scene_.applyCollisionObject(sponge);
ros::Duration(1).sleep();
}
void RemoveBoxFromScene() {
std::vector<std::string> objs;
objs.push_back("sponge");
scene_.removeCollisionObjects(objs);
}
把持対象物(スポンジ)が発見されたら時点、上記の関数を利用して可視化します。
下記はDoPickAndPlace関数の最初に追加します。
1
AddBoxToScene(msg);
下記はDoPickAndPlace関数の終わりに追加します。
1
RemoveBoxFromScene();
最後に、ピッキングをする際スポンジキューブをマニピュレータに付けて、プレースをする際にマニピュレータから取ることを追加します。
下記はDoPickのGraspの後に追加します。
1
arm_.attachObject("sponge", "", gripper_group_.getLinkNames());
下記はDoPlaceのReleaseの後に追加します。
1
arm.detachObject("sponge");
上記はMoveIt!のプラニングシーンに物体を追加・削除します。
これでMoveIt!はテーブルとスポンジキューブに当たらない移動経路を計算します。
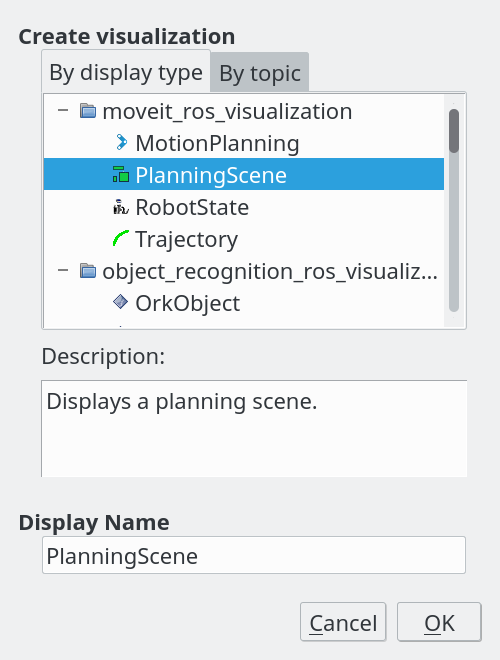
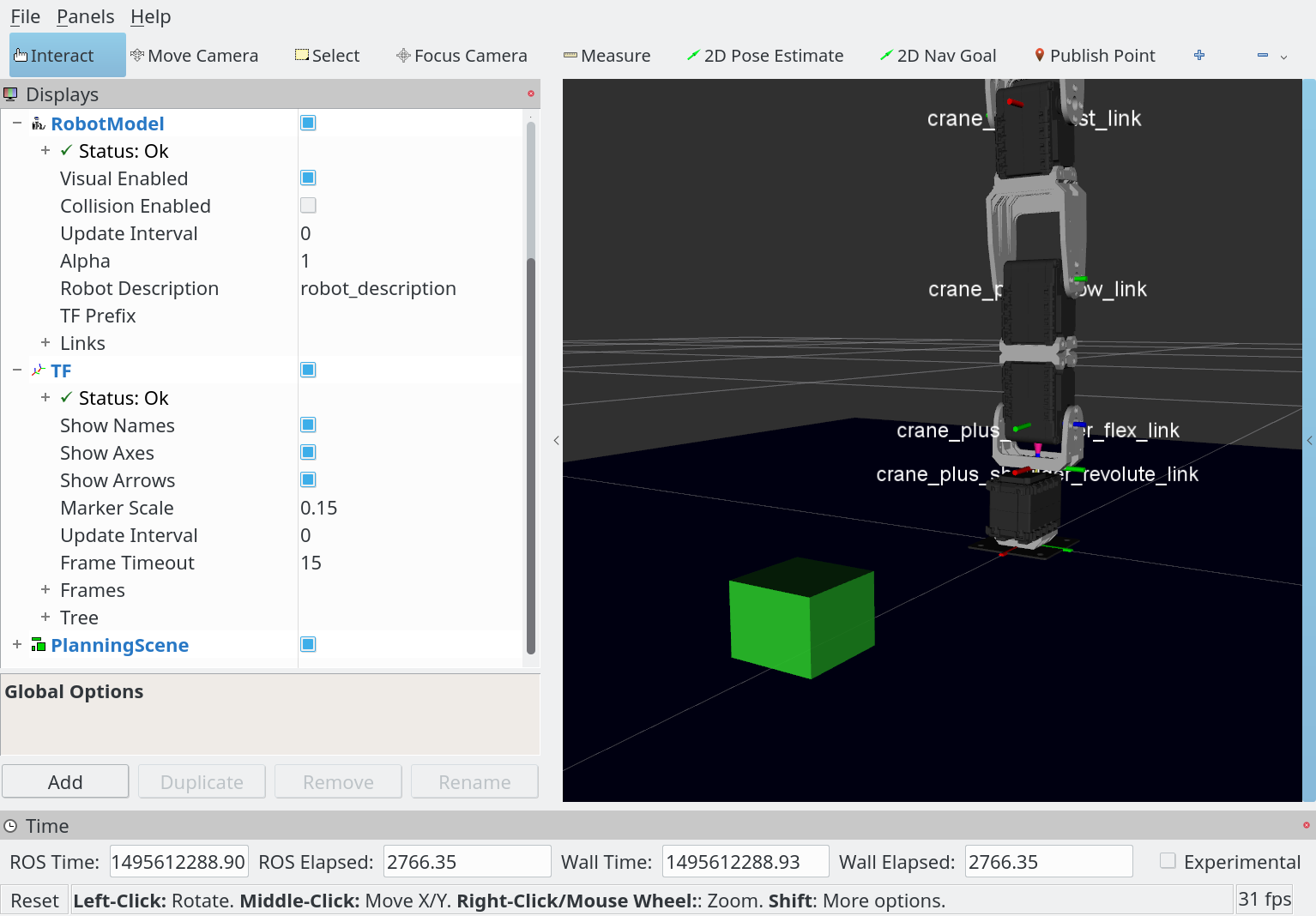
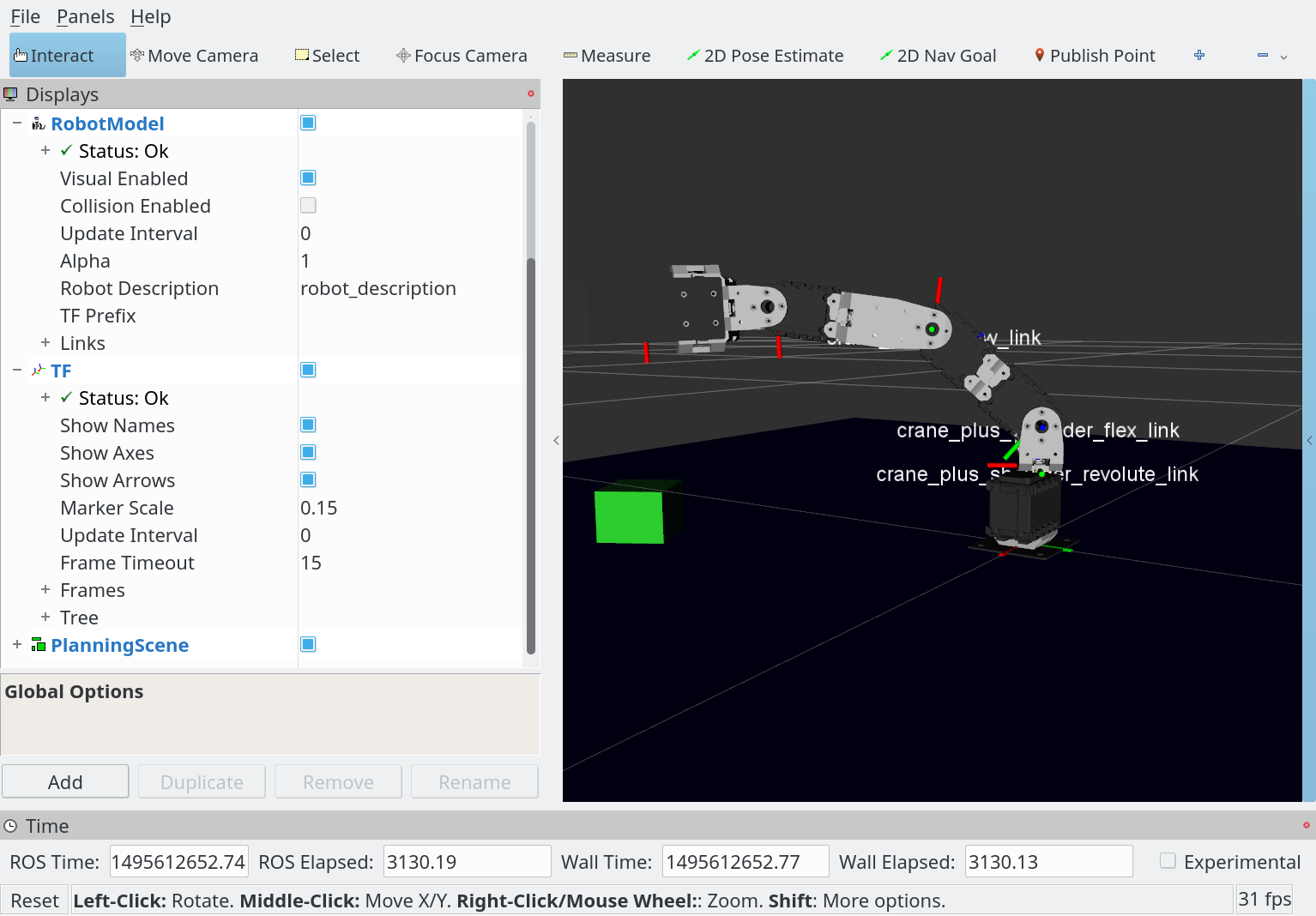
そして、プラニングシーンを見るために、RVizを利用します。システムを起動した後、RVizを移動して以下のように「PlanningScene」の可視化を追加します。
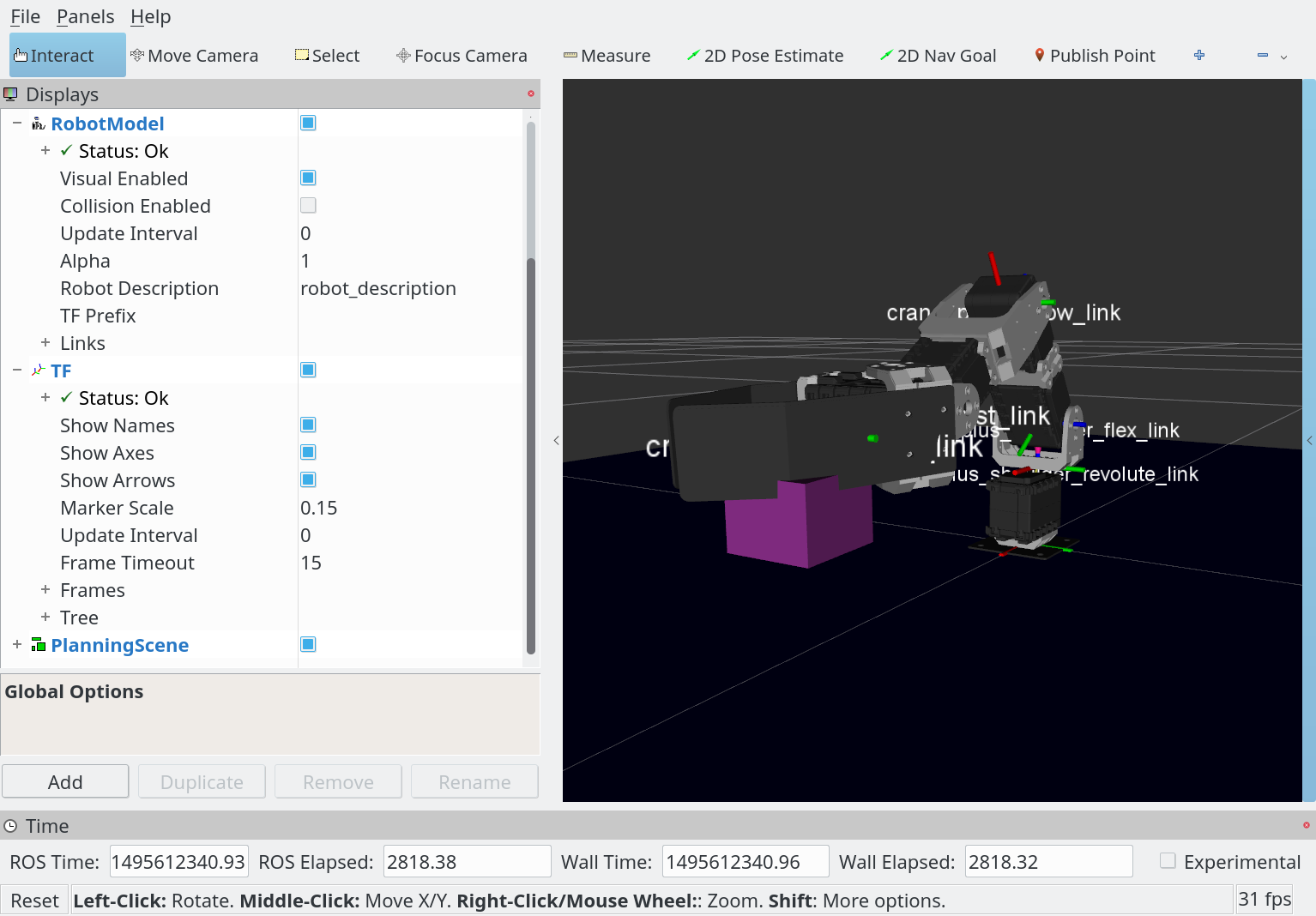
以下のようにでピック・アンド・プレースの流れが可視化されました。
このソースは以下のURLでダウンロード可能です。
https://github.com/gbiggs/rsj_2017_pick_and_placer/tree/planning_scene_visualisation
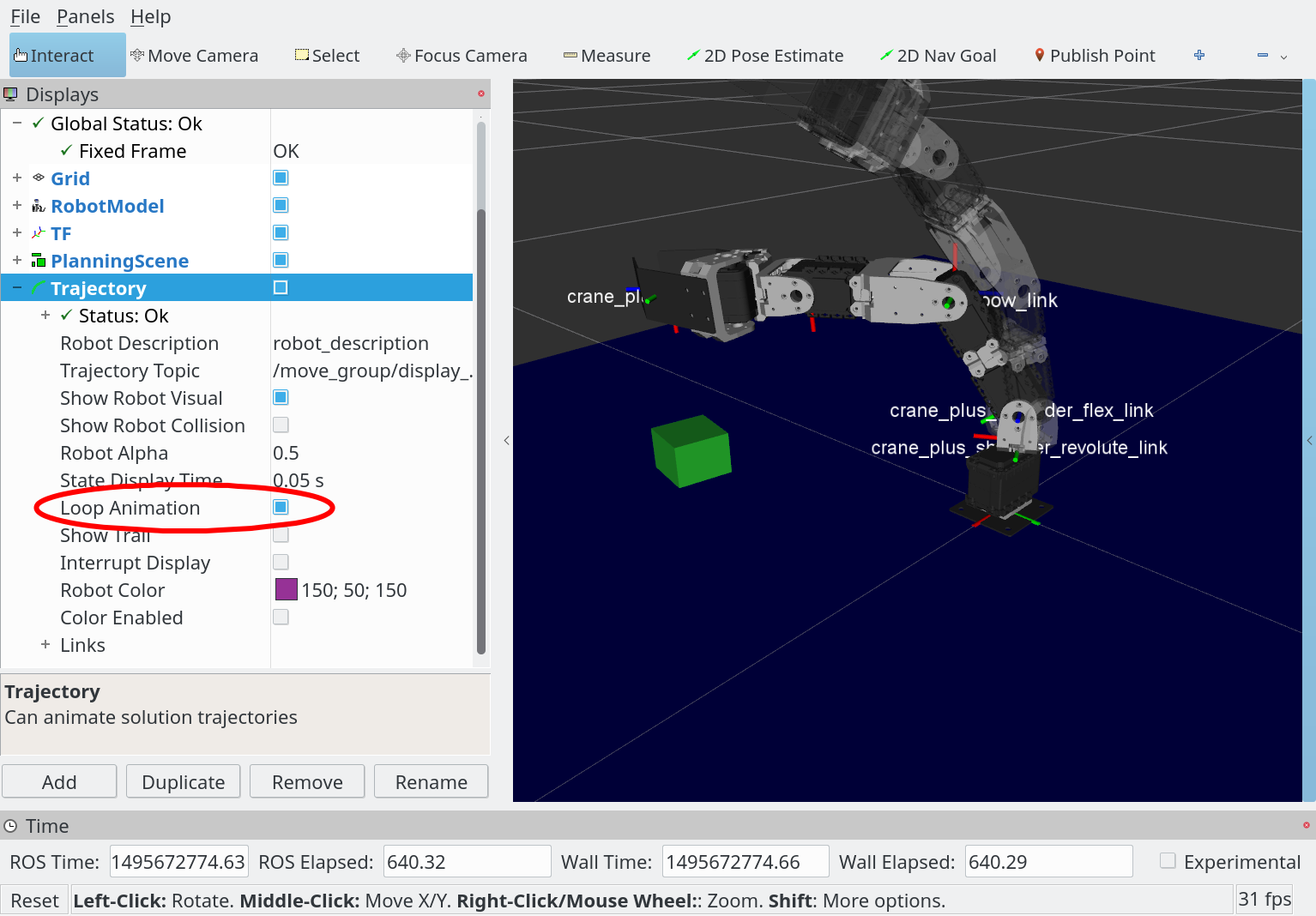
プラニング結果の可視化
MoveIt!が計算した移動経路の可視化も可能です。
RVizを利用することで、ノードのソースを変更せずに確認することが可能です。
RVizで「Trajectory」の可視化を追加します。
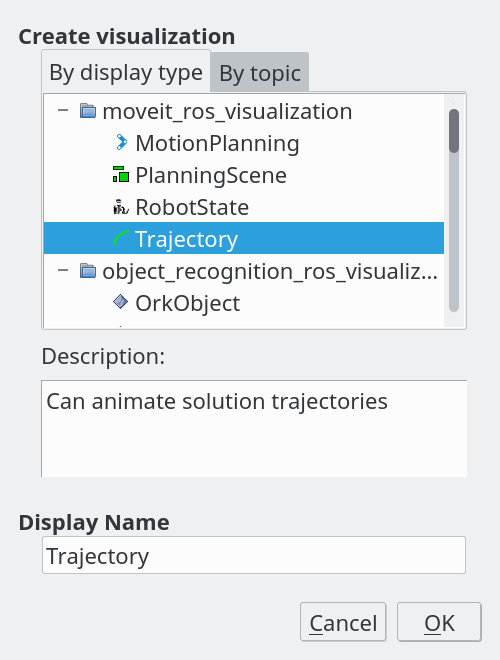
Trajectoryのオプションで「Loop Animation」を選択すると、計算された移動経路が繰り返し表示されます。