Ubuntu LinuxとROSのインストール
Updated on: 2019-11-13
本セミナーで使用する開発環境として Ubuntu Linux とその上で動作する ROS を利用します。
本ページでは Ubuntu Linux と ROS のインストール方法を紹介します。
用意するもの
- ノート型パソコン
– 本手順によりパソコンの既存のOS(Windows等)及び保存されているデータやソフトウェアは完全に削除されます。
予めにバックアップを行ってください。 - 容量 4GB 以上の空 USB メモリ
- インターネット接続
手順
Ubuntu Linux のダウンロード
-
下記URLから Ubuntu Linux のインストールイメージをダウンロードします
本セミナーでは Ubuntu 16.04 Xenial 64bit Desktop 版を推奨します。
中級者以上であれば、Ubuntu 18.04 Bionic を使用することもできますが、セミナーの内容を適宜読み替えて進めて頂く必要があります。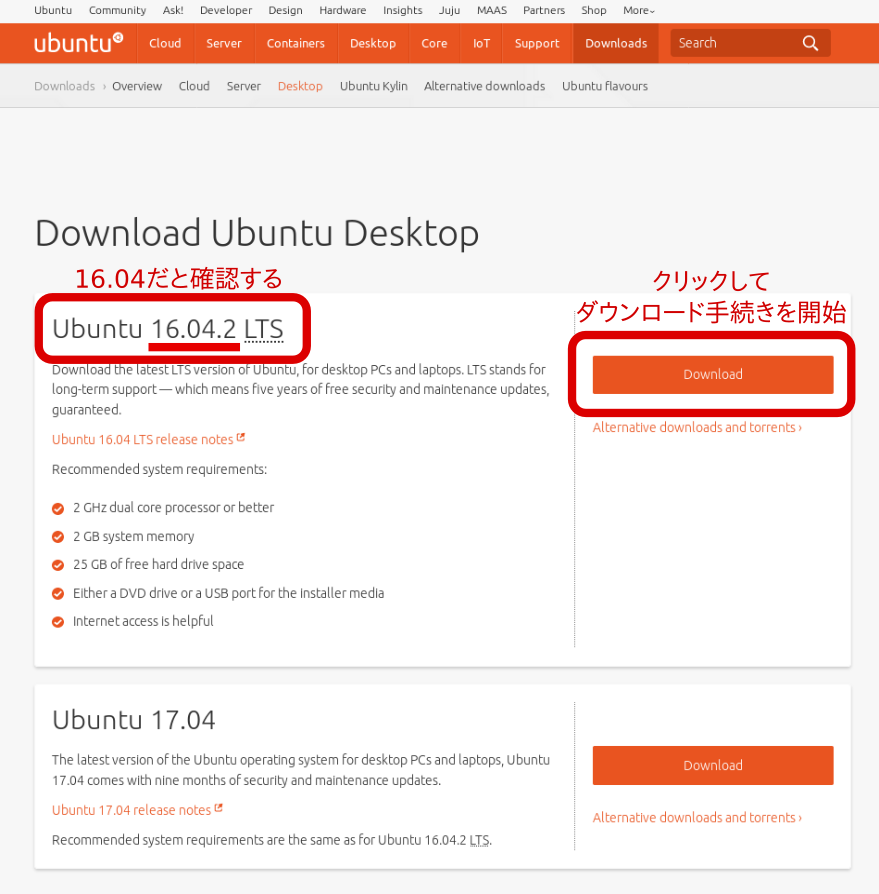
-
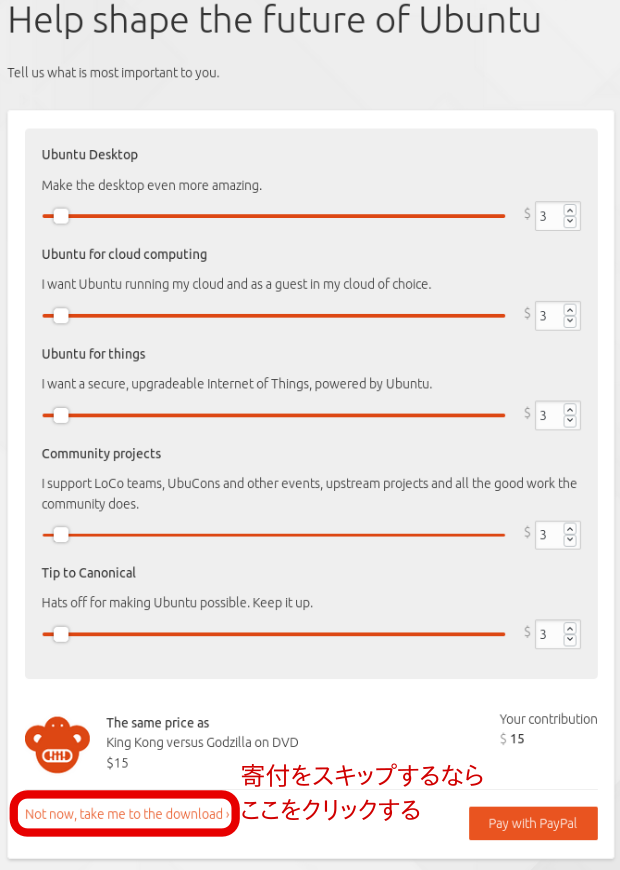
Ubuntu をメンテナンスしている Canonical に寄付することも可能ですが、必須ではありません
-
以下の画面になったら、ダウンロードが自動的に始まります
Live USB の作成
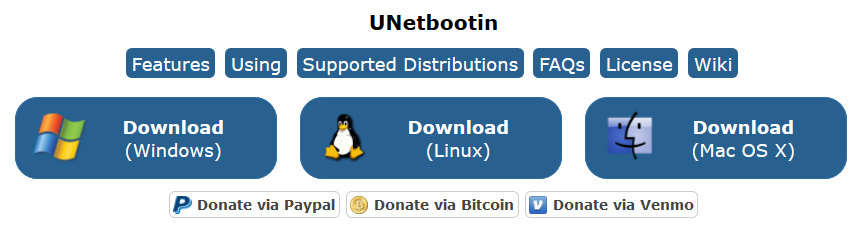
- 下記 URL から、Live USB 作成ソフトをダウンロードします。
-
Windows、Mac OS Xの場合:https://unetbootin.github.io/
ページ中の、Live USB 作成に使用しているPCのOSを選択してください。
-
Linux (Debian/Ubuntu) の場合: 下記コマンドを実行
1
$ sudo apt-get install unetbootin
-
-
誤って必要なデータを削除してしまうのを防ぐため、使用しない USB メモリや、メモリーカードを取り外し、使用する USB メモリのみを接続します。
使用する USB メモリは、ファイルが入っていない空の状態にして下さい。 -
Live USB を作成する PC と Ubuntu をインストール する PC はそれぞれ別でも構いません。
-
ダウンロードした unetbootin-windows-???.exe(Windows の場合)を実行します。
下記、「Windows によって PC が保護されました」画面が現れた場合は、「実行」ボタンをクリックしてください。
また、下記のユーザアカウント制御画面が現れた場合、「はい」をクリックしてください。
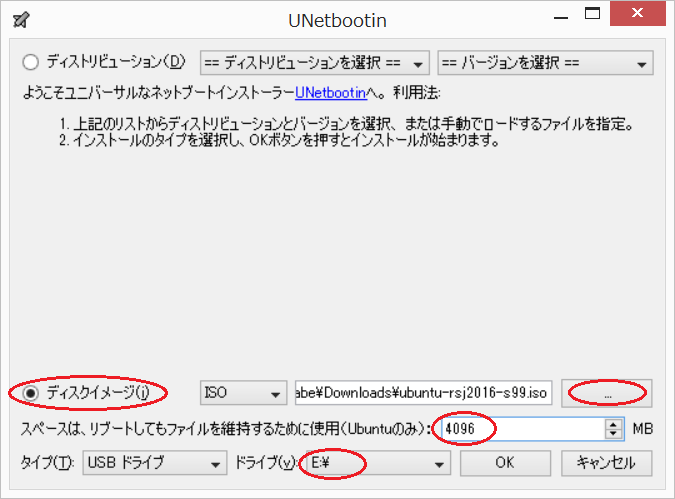
- UNetbootin の画面で、「ディスクイメージ」を選択し、「…」ボタンをクリックして先ほどダウンロードした
ubuntu-xxxx.isoファイルを選択します。
(xxxx はダウンロードしたファイル名に合わせて変更ください)
また、「スペースは、リブートしてもファイルを維持するために使用」欄に「4096」と入力し、「ドライブ」欄で、使用する USB メモリのドライブ名を選択します。
内容を確認後、「OK」をクリックしてください。
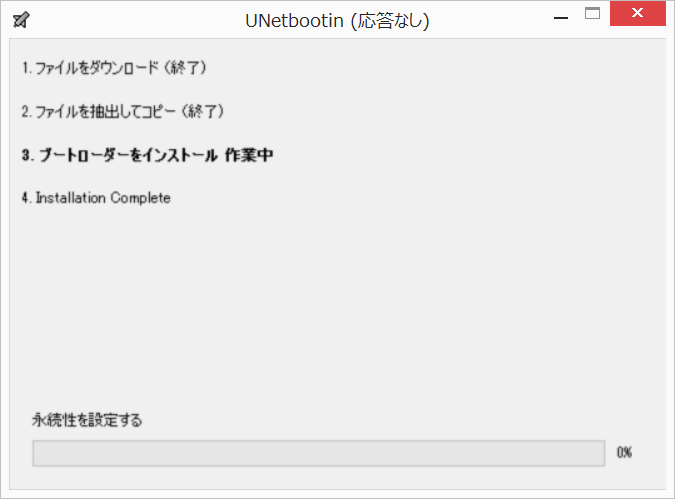
書き込み完了までしばらく待機します。
USB2.0 の場合10分以上、書き込み速度の遅いメモリだと30分程度かかる場合があります。
下記の「永続性を設定する」画面で「応答なし」と表示される場合がありますが、正常に動作していますので、そのまま待機してください。
下記画面が表示されれば、「Live USB」の作成は完了です。終了をクリックして下さい。
-
Live USBから起動するためのBIOSの設定を行います。
セミナーで使用する PC の電源を切り、下記の手順で作成した Live USB を接続した状態で起動します。
起動時に、BIOS 設定画面に入ります。PC のメーカー毎に BIOS への入り方が異なりますので、マニュアル等で確認してください。
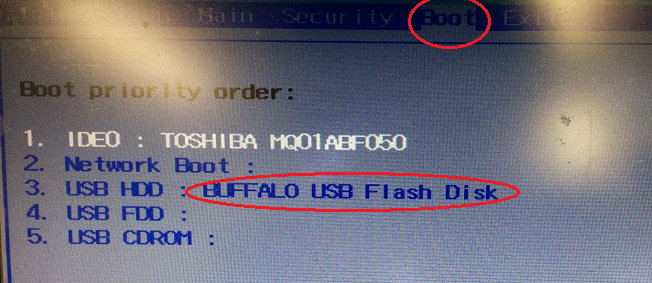
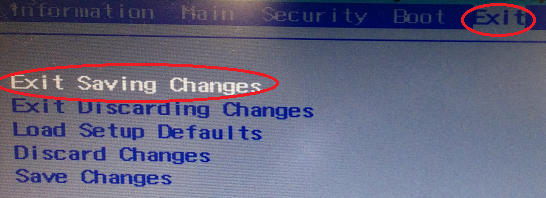
下記の図は Acer での BIOS 設定画面の例です。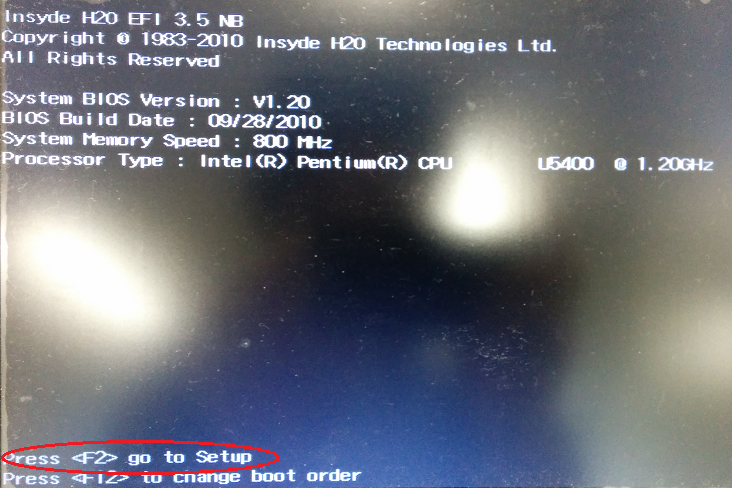
BIOS 設定画面に入ったら、起動順(Boot order, Boot priority)の設定で、USB メモリが最優先になるように設定します。 (表示は使用している PC および USB メモリのメーカーによって異なります)
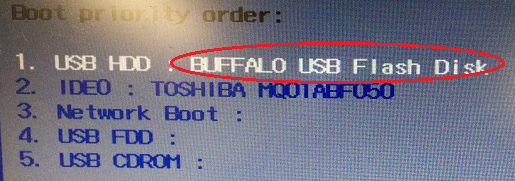
設定を保存して再起動します。
Ubuntu Linux のインストール
-
Live USB をパソコンに接続し、パソコンの電源を入れます。
-
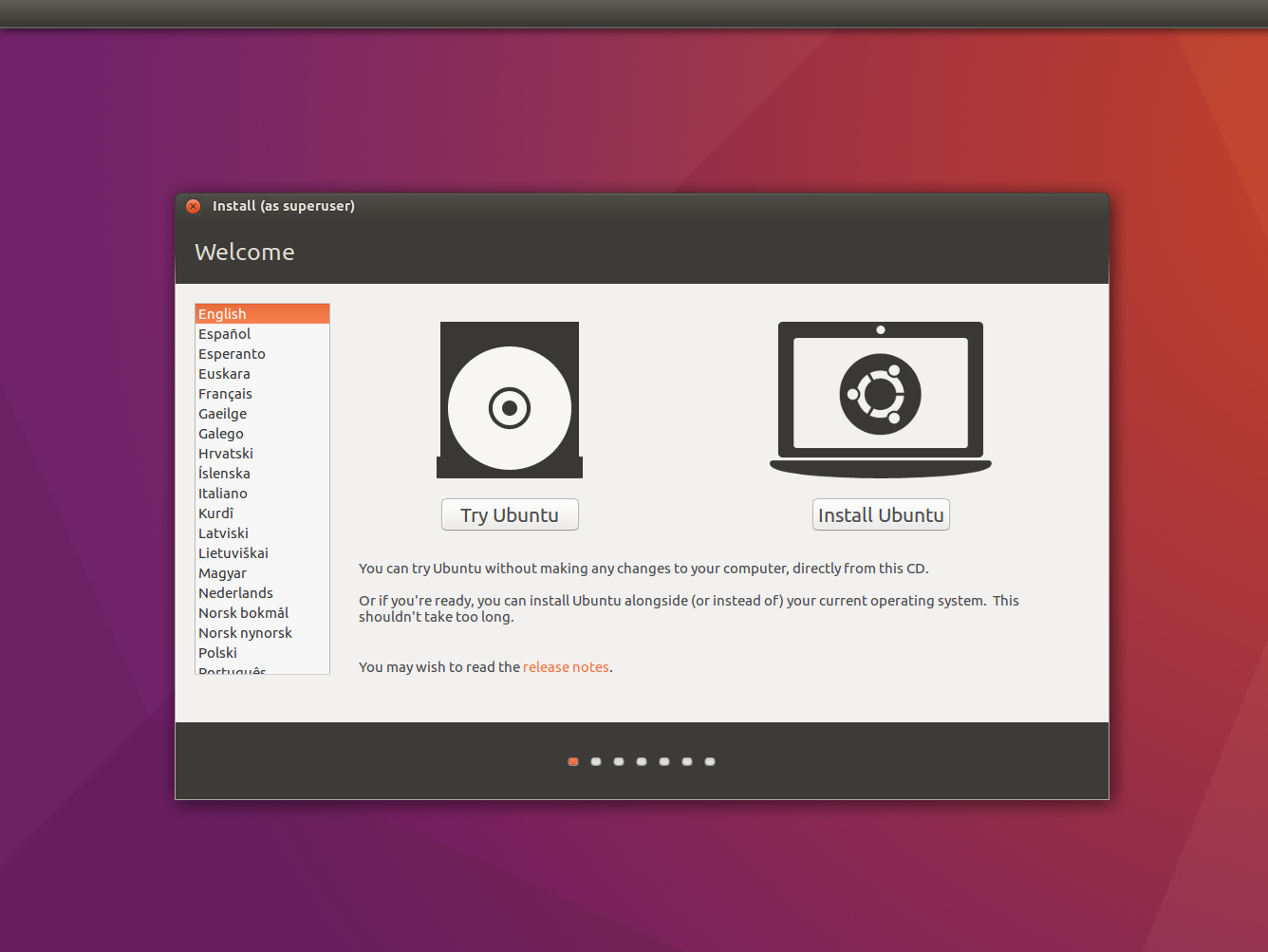
以下の画面が表示されます。言語を選択してください。
-
「Ubuntu をインストール」を選択しインストール手順を開始します。
画面に出る説明に従ってインストール手順を続いてください。
-
以下の画面に届いたら、「ディスクを削除して Ubuntu をインストールする」を選択してください。

-
インストール後、LiveUSB を外してパソコンを再起動すると以下の画面が現れます。
これで Ubuntu Linux のインストールが完了です。
ROS ベースパッケージのインストール
-
ROS Kinetic Kameをインストールします。
以下の URL に記載された手順に従って ROS のベースパッケージをインストールしてください。
インストールパッケージの種別については「すべてのデスクトップ環境(推奨)」に従ってください。以下はインストールするためのコマンドを抜き出したものです。
詳細については上記ページを参照ください。1 2 3 4 5 6 7 8 9 10 11 12
$ sudo sh -c \ 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" \ > /etc/apt/sources.list.d/ros-latest.list' $ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 \ --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 $ sudo apt-get update $ sudo apt-get install ros-kinetic-desktop-full $ sudo rosdep init $ rosdep update $ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc $ source ~/.bashrc $ sudo apt-get install python-rosinstall
-
インストールの確認のため、新しい端末(ターミナル)を起動して、下記を実行してください。
1
$ printenv | grep ROS
下記が出力されたら、ROSのインストールが完了しています。
1 2 3 4 5 6
ROS_ROOT=/opt/ros/kinetic/share/ros ROS_PACKAGE_PATH=/opt/ros/kinetic/share ROS_MASTER_URI=http://localhost:11311 ROSLISP_PACKAGE_DIRECTORIES= ROS_DISTRO=kinetic ROS_ETC_DIR=/opt/ros/kinetic/etc/ros
本セミナーに必要なパッケージのインストール
最後に、本セミナーに必要なパッケージをインストールします。以下のコマンドの実行し、インストールを行ってください。
1
2
3
4
5
sudo apt-get install ros-kinetic-moveit-* \
ros-kinetic-dynamixel-motor \
ros-kinetic-usb-cam \
ros-kinetic-joint-trajectory-controller \
ros-kinetic-effort-controllers
以上で、開発環境の構築が完了しました。