IDLファイル
目次
- ActArrayActuatorPos
- ActArrayActuatorSpeed
- ActArrayActuatorCurrent
- ActArrayState
- CameraImage
- Fiducials
- GPSData
- GripperState
- INSData
- LimbState
- Hypotheses2D
- Hypotheses3D
- Features
- MultiCameraImages
- Path2D
- Path3D
- PointCloud
- PanTiltAngles
- PanTiltState
- RangeData
- IntensityData
ActArrayActuatorPos
単一のアクチュエータの位置を格納するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| index | unsigned short | アクチュエータの番号 | |
| position | double | アクチュエータの位置 | m or rad |
ActArrayActuatorSpeed
単一のアクチュエータの速度を格納するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| index | unsigned short | アクチュエータの番号 | |
| speed | double | アクチュエータの速度 | m or rad |
ActArrayActuatorCurrent
単一のアクチュエータの電流値を格納するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| index | unsigned short | アクチュエータの番号 | |
| current | double | アクチュエータの電流値 | A |
ActArrayState
複数のアクチュエータの情報を格納するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| actuators | RTC::ActuatorList | アクチュエータのリスト |
ActuatorList
RTC::Actuator型の配列として定義。
Actuator
単一のアクチュエータの情報を格納する。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| position | double | 現在の位置 | m or rad |
| speed | double | 現在の速度 | m/s or rad/s |
| accel | double | 現在の加速度 | m/s^2 or rad/s^2 |
| current | double | 現在の電流値 | A |
| status | RTC::ActArrayActuatorStatus | 状態 |
ActArrayActuatorStatus
以下の値を列挙。 アクチュエータの状態を表現。
| 名前 | 説明 |
|---|---|
| ACTUATOR_STATUS_IDLE | 停止 |
| ACTUATOR_STATUS_MOVING | 動作中 |
| ACTUATOR_STATUS_BRAKED | 故障 |
| ACTUATOR_STATUS_STALLED | 脱調 |
ActArrayGeometry
複数のアクチュエータのジオメトリ情報を格納
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| arrayGeometry | RTC::Geometry3D | ジオメトリ情報 | |
| actuatorGeometry | RTC::ActArrayActuatorGeometryList | ジオメトリ情報 |
ActArrayActuatorGeometryList
RTC::ActArrayActuatorGeometry型の配列として定義。
ActArrayActuatorGeometry
個々のアクチュエータのジオメトリ情報を格納。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| type | RTC::ActArrayActuatorType | アクチュエータの種別 | m or rad |
| length | double | 0の位置になる長さ | m or rad |
| orientation | RTC::Orientation3D | 姿勢 | |
| axis | RTC::Vector3D | 駆動軸 | |
| minRange | double | 最小動作範囲 | m or rad |
| centre | double | 動作範囲の中心位置 | m or rad |
| maxRange | double | 最大動作範囲 | m or rad |
| homePosition | double | ホームポジション | m or rad |
| hasBrakes | boolean | 故障時にTrue |
ActArrayActuatorType
以下の値を列挙。 アクチュエータの種別を表現。
| 名前 | 説明 |
|---|---|
| ACTARRAY_ACTUATORTYPE_LINEAR | 並進駆動 |
| ACTARRAY_ACTUATORTYPE_ROTARY | 回転駆動 |
BumperArrayGeometry
複数のバンパセンサのジオメトリ情報を格納。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| arrayGeometry | RTC::Geometry3D | 配列全体のジオメトリ情報 | |
| bumperGeometry | RTC::BumperGeometryList | バンパのリスト |
BumperGeometryList
RTC::BumperGeometry型の配列として定義。
BumperGeometry
バンパセンサのジオメトリ情報。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| pose | RTC::Pose3D | ベース座標 | |
| size | RTC::Size3D | 形状 | |
| roc | double | バンプセンサの曲率半径 | m |
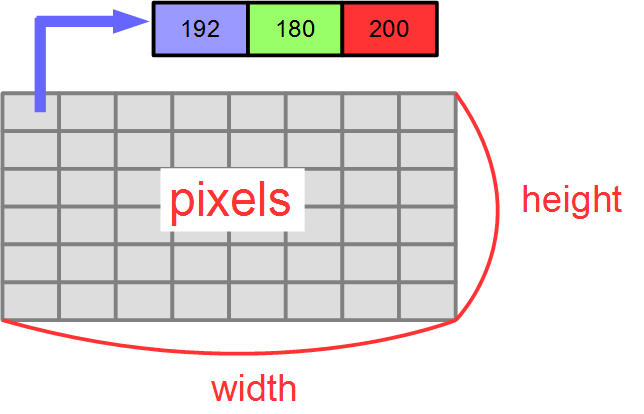
CameraImage
画像データを表現するデータ型。 今後はImg::TimedCameraImage型を使う事推奨。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| width | unsigned short | 画像の幅 | pixel |
| height | unsigned short | 画像の高さ | pixel |
| bpp | unsigned short | 色深度 | bpp |
| format | string | フォーマット名(jpeg、png) | |
| fDiv | double | スケールファクタ | |
| pixels | sequence< octet > | 画像データ |
CameraInfo
カメラデバイスの情報を格納。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| focalLength | RTC::Vector2D | 焦点距離 | |
| principalPoint | RTC::Point2D | 主点 | |
| k1 | double | 放射状歪み係数1 | |
| k2 | double | 放射状歪み係数2 | |
| p1 | double | 接線歪み係数1 | |
| p2 | double | 接線歪み係数2 |
Fiducials
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| fiducialsList | RTC::FiducialInfoList |
FiducialInfoList
RTC::FiducialInfoList型の配列として定義。
FiducialInfo
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| id | unsigned long | 識別番号 | |
| pose | RTC::Pose3D | ||
| poseUncertainty | RTC::Pose3D | ||
| size | RTC::Size3D | ||
| sizeUncertainty | RTC::Size3D |
FiducialFOV
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| minRange | double | m | |
| maxRange | double | m | |
| viewAngle | double | rad |
GPSData
GPSの測位データを格納。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| timeFromGPS | RTC::GPSTime | GPS時 | |
| latitude | double | 緯度 | deg |
| longitude | double | 経度 | deg |
| altitude | double | 高度(楕円体表面からの高さ) | m |
| horizontalError | double | m | |
| verticalError | double | m | |
| heading | double | rad | |
| horizontalSpeed | double | m/s | |
| verticalSpeed | double | m/s | |
| numSatellites | unsigned short | ||
| fixType | RTC::GPSFixType |
GPSFixType
以下の値を列挙。
| 名前 | 説明 |
|---|---|
| GPS_FIX_NONE | |
| GPS_FIX_NORMAL | |
| GPS_FIX_DGPS |
GPSTime
GPS時を表現する。 RTC::Timeとは単位が違うので注意。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| sec | unsigned long | 秒 | s |
| msec | unsigned long | ミリ秒 | ms |
GripperState
グリッパーの状態を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| status | RTC::GripperStatus | データ |
GripperStatus
以下の値を列挙。
| 名前 | 説明 |
|---|---|
| GRIPPER_STATE_OPEN | 開いた状態 |
| GRIPPER_STATE_CLOSED | 閉じた状態 |
| GRIPPER_STATE_MOVING | 動作中 |
| GRIPPER_STATE_UNKNOWN | 不明 |
GripperGeometry
グリッパーのジオメトリ情報
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| exterior | RTC::Geometry3D | ||
| interior | RTC::Geometry3D |
INSData
慣性航法装置の自己位置を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| latitude | double | 緯度 | deg |
| longitude | double | 経度 | deg |
| altitude | double | 高度(楕円体表面からの高さ) | m |
| heightAMSL | double | 平均海抜空の高さ | m |
| velocityENU | RTC::Velocity3D | ||
| orientation | RTC::Orientation3D |
LimbState
エンドエフェクタの状態を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| oapMatrix | RTC::OAP | ||
| status | RTC::LimbStatus |
LimbStatus
以下の値を列挙。
| 名前 | 説明 |
|---|---|
| LIMB_STATUS_IDLE | 停止 |
| LIMB_STATUS_BRAKED | 故障 |
| LIMB_STATUS_MOVING | 移動中 |
| LIMB_STATUS_OOR | |
| LIMB_STATUS_COLLISION | 接触 |
Hypotheses2D
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| hypotheses | RTC::Hypothesis2DList | データ |
Hypothesis2DList
RTC::Hypothesis2D型の配列として定義。
Hypothesis2D
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| mean | RTC::Pose2D | ||
| covariance | RTC::Covariance2D | ||
| weight | double |
Hypotheses3D
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| hypotheses | RTC::Hypothesis3DList | データ |
Hypothesis3DList
RTC::Hypothesis3D型の配列として定義。
Hypothesis3D
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| mean | RTC::Pose3D | ||
| covariance | RTC::Covariance3D | ||
| weight | double |
OGMapConfig
占有格子地図を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| xScale | double | X軸のスケール | セル/メートル |
| yScale | double | Y軸のスケール | セル/メートル |
| width | unsigned long | X軸のセルの個数 | 個 |
| height | unsigned long | Y軸のセルの個数 | 個 |
| origin | RTC::Pose2D | (0,0)のセルの現在位置(ワールド座標) |
OGMapTile
タイルマップの表現
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| column | unsigned long | このタイルの(0,0)セルの全体マップ上X座標 | |
| row | unsigned long | このタイルの(0,0)セルの全体マップ上Y座標 | |
| width | unsigned long | タイルの沿ったセルの数(X) | 個 |
| height | unsigned long | タイルの沿ったセルの数(Y) | 個 |
| cells | RTC::OGMapCells |
OGMapCells
octet型の配列として定義。
Features
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| pointFeatures | RTC::PointFeatureList | ||
| poseFeatures | RTC::PoseFeatureList | ||
| lineFeatures | RTC::LineFeatureList |
PoseFeatureList
RTC::PoseFeature型の配列として定義。
PoseFeature
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| probability | double | ||
| position | RTC::Pose2D | ||
| covariance | RTC::PointCovariance2D |
PointFeatureList
RTC::PointFeature型の配列として定義。
PointFeature
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| probability | double | ||
| position | RTC::Pose2D | ||
| covariance | RTC::PointCovariance2D |
LineFeatureList
RTC::LineFeature型の配列として定義。
LineFeature
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| probability | double | ||
| rho | double | ||
| alpha | double | ||
| covariance | RTC::PointCovariance2D | ||
| start | RTC::Point2D | ||
| end | RTC::Point2D | ||
| startSighted | boolean | ||
| endSighted | boolean |
MultiCameraImages
複数カメラの画像データを表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| images | RTC::MulticameraImageList | データ |
MulticameraInfoList
RTC::CameraImage型の配列として定義。
MulticameraImageList
RTC::CameraImage型の配列として定義。
MulticameraGeometry
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| geometry | RTC::Geometry3D | カメラシステム全体のジオメトリ情報 | |
| cameraGeometries | RTC::MulticameraGeometryList | 個々のカメラのジオメトリ情報 |
MulticameraGeometryList
RTC::Geometry3D型の配列として定義。
Path2D
2次元での目標経路を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| waypoints | RTC::Waypoint2DList | データ |
Waypoint2DList
RTC::Waypoint2D型の配列として定義。
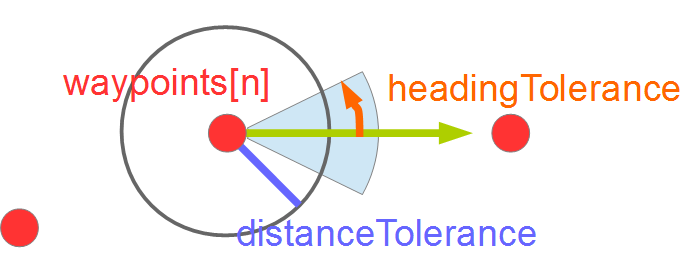
Waypoint2D
2次元でのウェイポイントを表現
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| target | RTC::Pose2D | 位置 | |
| distanceTolerance | double | 成功と判定するウェイポイントからの半径距離 | m |
| headingTolerance | double | rad | |
| timeLimit | RTC::Time | ウェイポイントに到達する目標時間 | |
| maxSpeed | RTC::Velocity2D | 最大速度 |
Path3D
3次元での目標経路を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| waypoints | RTC::Waypoint3DList | データ |
Waypoint3DList
RTC::Waypoint3D型の配列として定義。
Waypoint3D
3次元でのウェイポイントを表現
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| target | RTC::Pose3D | 位置 | |
| distanceTolerance | double | 成功と判定するウェイポイントからの半径距離 | m |
| headingTolerance | double | rad | |
| timeLimit | RTC::Time | ウェイポイントに到達する目標時間 | |
| maxSpeed | RTC::Velocity3D | 最大速度 |
PointCloud
3次元の点群を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| points | RTC::PointCloudPointList | データ |
PointCloudPointList
RTC::PointCloudPoint型の配列として定義。
PointCloudPoint
ポイントクラウドの各点
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| point | RTC::Point3D | 位置 | |
| colour | RTC::RGBColour | 色 |
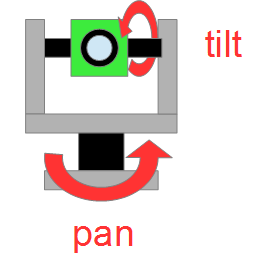
PanTiltAngles
パン・チルトの姿勢を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| pan | double | 左右の角度 | rad |
| tilt | double | 上下の角度 | rad |
PanTiltState
パン・チルトの状態を表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| angles | RTC::PanTiltAngles | データ | |
| panSpeed | double | 左右の回転速度 | rad/s |
| tilt | tiltSpeed | 上下の回転速度 | rad/s |
RangeData
測域センサの計測データを表現するデータ型。
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| ranges | RTC::RangeList | 距離データ | m |
| geometry | RTC::RangerGeometry | 測域センサのジオメトリ情報 | |
| config | RTC::RangerConfig | 測域センサの設定情報 |
RangeList
double型の配列として定義。
RangerGeometry
測域センサのジオメトリ情報
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| geometry | RTC::Geometry3D | 全体のジオメトリ情報 | |
| elementGeometries | RTC::ElementGeometryList | 個々のセンサのジオメトリ情報 |
ElementGeometryList
RTC::Geometry3D型の配列として定義。
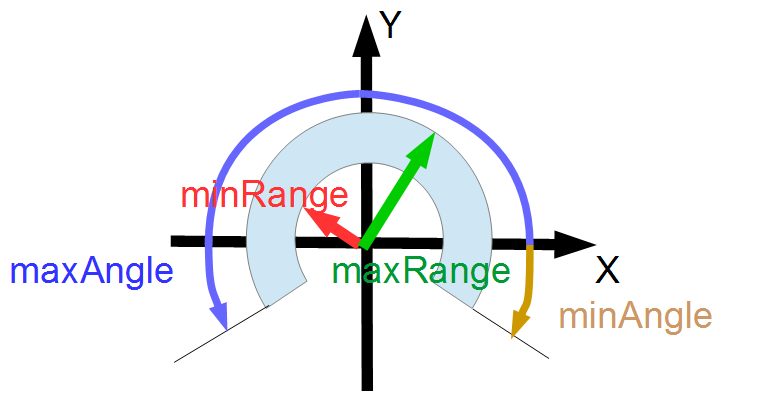
RangerConfig
測域センサの設定情報
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| minAngle | double | スキャン範囲の最小角度 | rad |
| maxAngle | double | スキャン範囲の最大角度 | rad |
| angularRes | double | 角度分解能 | rad |
| minRange | double | 最短検出距離 | m |
| maxRange | double | 最長検出距離 | m |
| rangeRes | double | 距離分解能 | m |
| frequency | double | スキャンの周波数 | Hz |
IntensityData
| 名前 | 型 | 説明 | 単位 |
|---|---|---|---|
| tm | RTC::Time | タイムスタンプ | |
| intensities | RTC::IntensityList | 強度を0から1に正規化した値 | |
| geometry | RTC::RangerGeometry | 測域センサのジオメトリ情報 | |
| config | RTC::RangerConfig | 測域センサの設定情報 |
IntensityList
double型の配列として定義。
RFIDTagData
octet型の配列として定義。